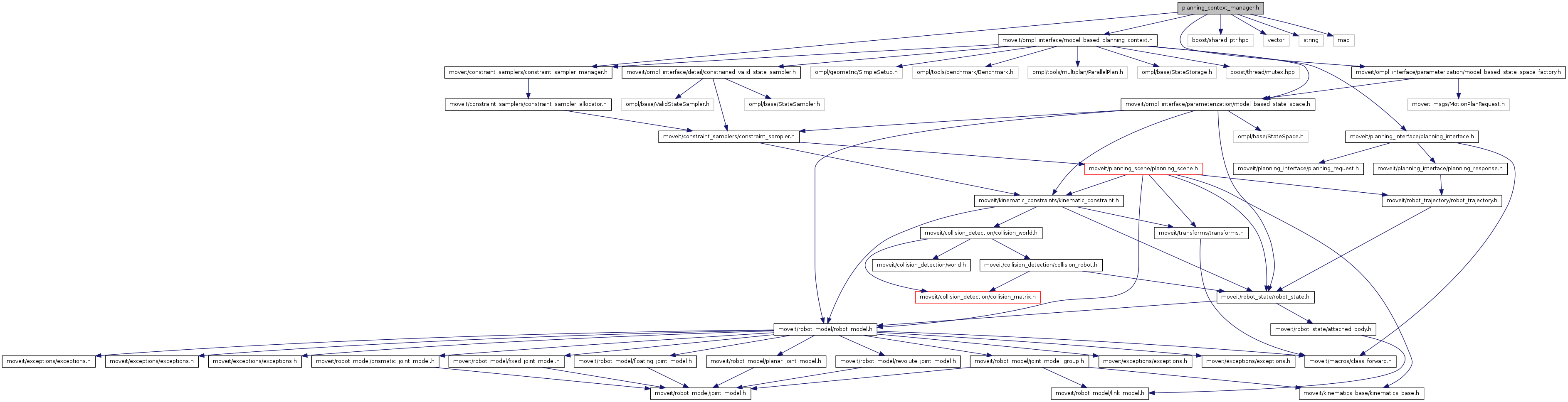
#include <moveit/ompl_interface/model_based_planning_context.h>#include <moveit/ompl_interface/parameterization/model_based_state_space_factory.h>#include <moveit/constraint_samplers/constraint_sampler_manager.h>#include <boost/shared_ptr.hpp>#include <vector>#include <string>#include <map>
Include dependency graph for planning_context_manager.h:
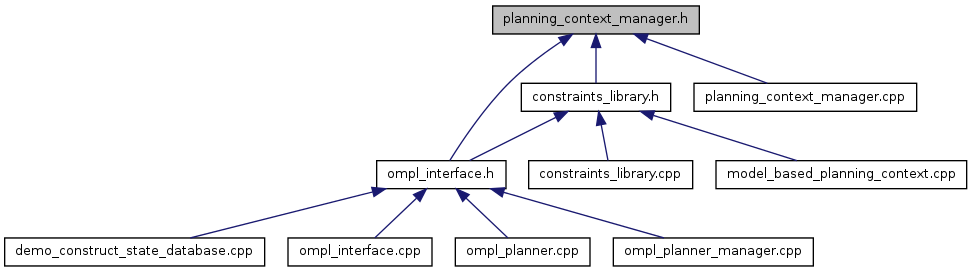
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ompl_interface::PlanningContextManager |
Namespaces | |
| namespace | ompl_interface |
The MoveIt interface to OMPL. | |