#include <madp/QAV.h>#include <madp/PerseusConstrainedPOMDPPlanner.h>#include <madp/JointBeliefEventDriven.h>#include <madp/NullPlanner.h>#include <mdm_library/controller_event_pomdp.h>
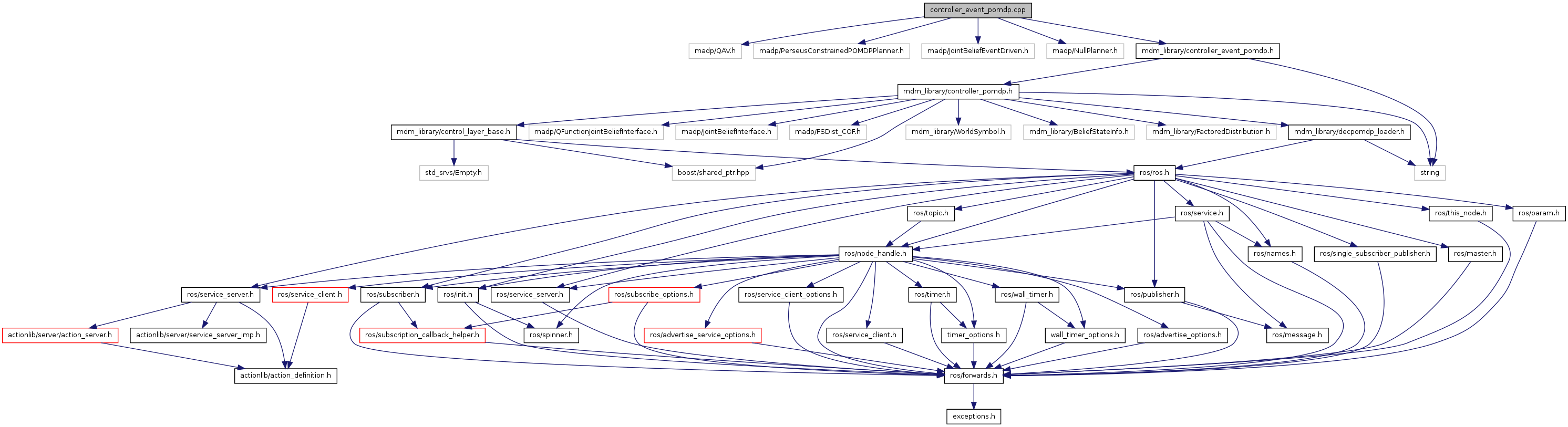
Include dependency graph for controller_event_pomdp.cpp:
#include <madp/QAV.h>#include <madp/PerseusConstrainedPOMDPPlanner.h>#include <madp/JointBeliefEventDriven.h>#include <madp/NullPlanner.h>#include <mdm_library/controller_event_pomdp.h>