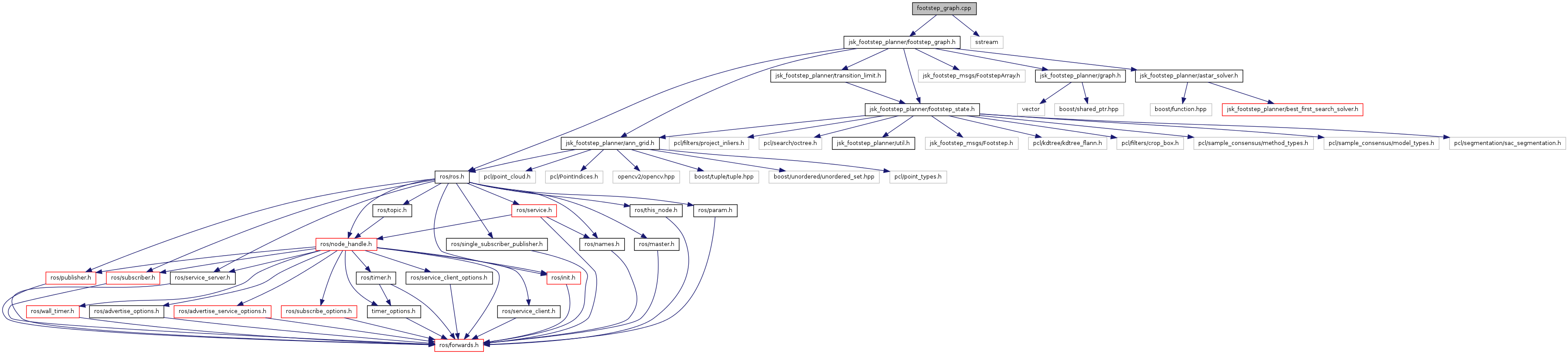
Include dependency graph for footstep_graph.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | jsk_footstep_planner |
Functions | |
| double | jsk_footstep_planner::footstepHeuristicStepCost (SolverNode< FootstepState, FootstepGraph >::Ptr node, FootstepGraph::Ptr graph, double first_rotation_weight, double second_rotation_weight) |
| double | jsk_footstep_planner::footstepHeuristicStraight (SolverNode< FootstepState, FootstepGraph >::Ptr node, FootstepGraph::Ptr graph) |
| double | jsk_footstep_planner::footstepHeuristicStraightRotation (SolverNode< FootstepState, FootstepGraph >::Ptr node, FootstepGraph::Ptr graph) |
| double | jsk_footstep_planner::footstepHeuristicZero (SolverNode< FootstepState, FootstepGraph >::Ptr node, FootstepGraph::Ptr graph) |