#include <ros/console.h>#include <industrial_extrinsic_cal/basic_types.h>#include <industrial_extrinsic_cal/camera_definition.h>#include "boost/make_shared.hpp"
Include dependency graph for ceres_blocks.h:

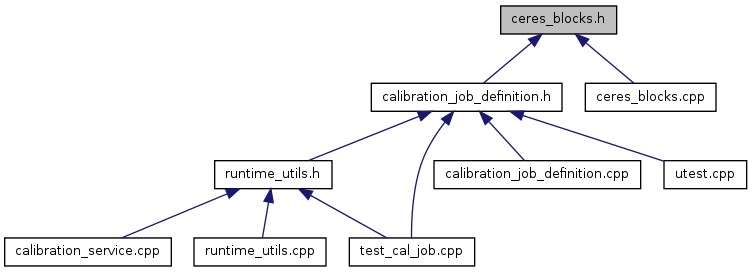
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | industrial_extrinsic_cal::CeresBlocks |
| These blocks of data hold the ceres parameters upon which the optimizaition proceeds Static cameras have a block of parameters for their 6Dof Pose they have a block of 4 parameters for pinhole projection model intrinsics they have a block of 10 parameters for their distortion projection intrinsics The 1st 4 parameters of the 10 distortion model are the same variables Moving cameras have identical sets of. More... | |
Namespaces | |
| namespace | industrial_extrinsic_cal |