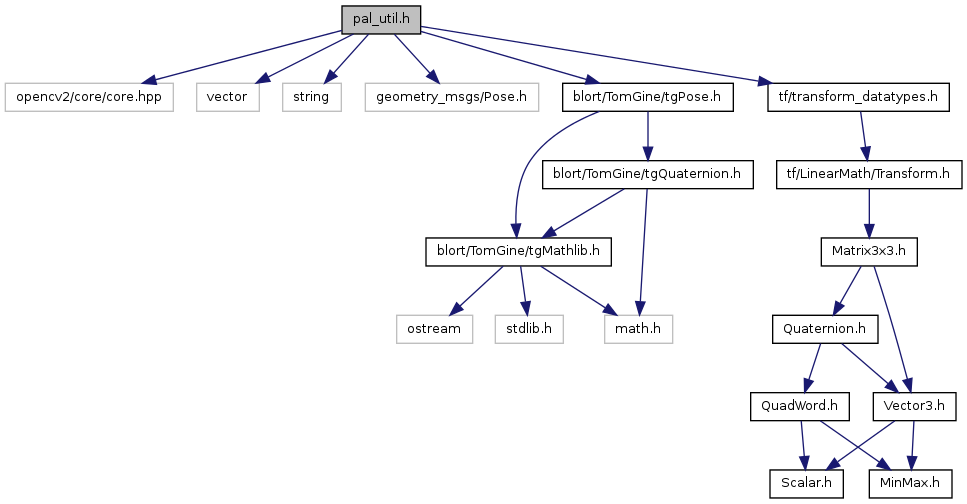
#include <opencv2/core/core.hpp>#include <vector>#include <string>#include <geometry_msgs/Pose.h>#include <blort/TomGine/tgPose.h>#include <tf/transform_datatypes.h>
Include dependency graph for pal_util.h:
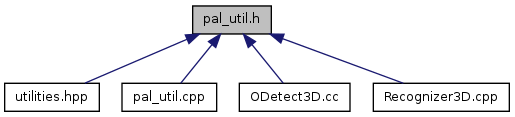
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | blort_ros |
Functions | |
| std::string | blort_ros::addRoot (const std::string &obj, const std::string &root) |
| geometry_msgs::Pose | blort_ros::blortPosesToRosPose (geometry_msgs::Pose reference, geometry_msgs::Pose target) |
| geometry_msgs::Pose | blort_ros::poseDiff (geometry_msgs::Pose pose1, geometry_msgs::Pose pose2) |
| bool | blort_ros::poseValidate (geometry_msgs::Pose known_pose, geometry_msgs::Pose pose_estimate, geometry_msgs::Pose max_error) |
| cv::Mat | blort_ros::quaternionTo3x3cvMat (geometry_msgs::Quaternion quaternion) |
| tf::Transform | blort_ros::rosPose2TfTransform (const geometry_msgs::Pose &pose) |
| TomGine::tgPose | blort_ros::rosPose2TgPose (const geometry_msgs::Pose &pose) |
| geometry_msgs::Pose | blort_ros::tfTransform2RosPose (const tf::Transform &transform) |
| geometry_msgs::Pose | blort_ros::tgPose2RosPose (const TomGine::tgPose &pose) |