Node for the motors of the mobile base. More...
#include "base_motor_node.h"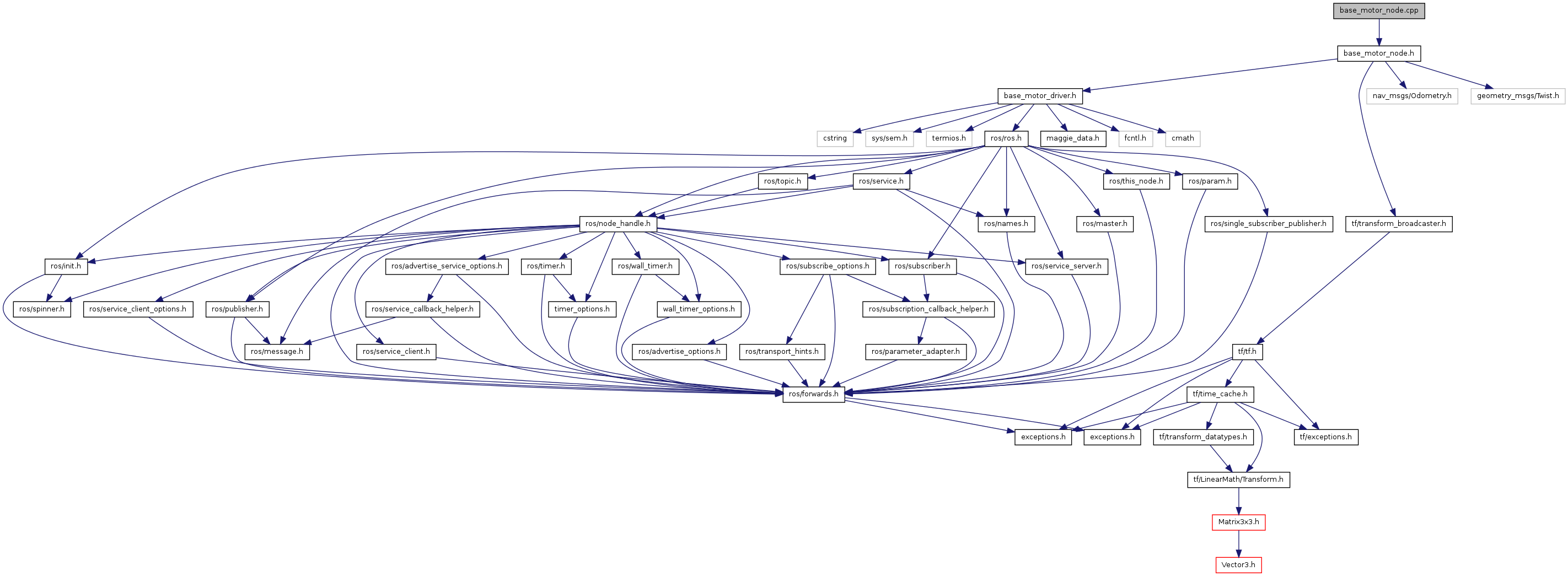
Go to the source code of this file.
Detailed Description
Node for the motors of the mobile base.
Specific definitions for Maggie.
Important data: A base controller that complies with: http://www.ros.org/wiki/navigation/Tutorials/RobotSetup/#Base_Controller_.28base_controller.29
An odometry publisher that complies with: http://www.ros.org/wiki/navigation/Tutorials/RobotSetup/#Odometry_Information_.28odometry_source.29
- Date:
- 2015-02
- Copyright:
- Copyright (C) 2015 University Carlos III of Madrid. All rights reserved. LEUC3M v1.0, see LICENSE.txt
This program is free software: you can redistribute it and/or modify it under the terms of the Licencia Educativa UC3M as published by the University Carlos III of Madrid, either version 1.0, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY. See the Licencia Educativa UC3M version 1.0 or any later version for more details.
A copy of the Licencia Educativa UC3M is in the LICENSE file.
- Date:
- 2015-02
- Date:
- 2006-05
- Copyright:
- Copyright (C) 2015 University Carlos III of Madrid. All rights reserved. LEUC3M v1.0, see LICENSE.txt
This program is free software: you can redistribute it and/or modify it under the terms of the Licencia Educativa UC3M as published by the University Carlos III of Madrid, either version 1.0, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY. See the Licencia Educativa UC3M version 1.0 or any later version for more details.
A copy of the Licencia Educativa UC3M is in the LICENSE file.
Definition in file base_motor_node.cpp.