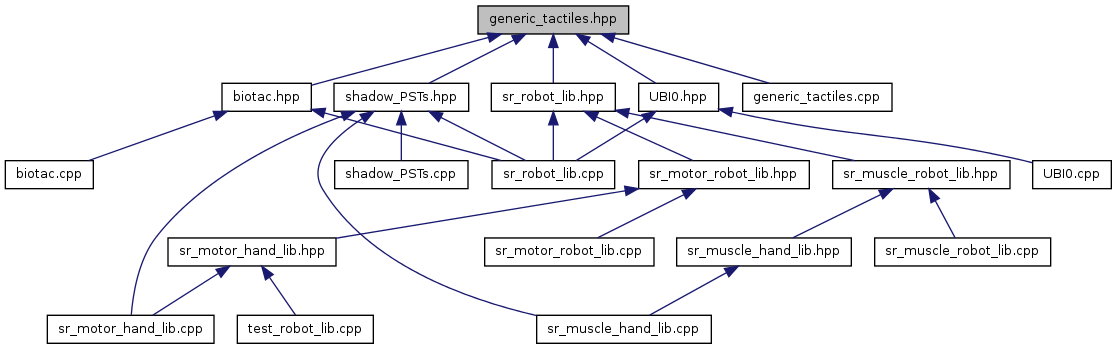
This is the main class for accessing the data from the tactiles. More...
#include <boost/smart_ptr.hpp>#include <sr_external_dependencies/types_for_external.h>#include <sr_external_dependencies/external/0220_palm_edc/0220_palm_edc_ethercat_protocol.h>#include <sr_external_dependencies/external/0230_palm_edc_TS/0230_palm_edc_ethercat_protocol.h>#include <sr_external_dependencies/external/0320_palm_edc_muscle/0320_palm_edc_ethercat_protocol.h>#include <ros/ros.h>#include <vector>#include <std_srvs/Empty.h>#include <diagnostic_msgs/DiagnosticStatus.h>#include <diagnostic_updater/DiagnosticStatusWrapper.h>#include <sr_hardware_interface/tactile_sensors.hpp>#include "sr_robot_lib/generic_updater.hpp"#include "sr_robot_lib/sensor_updater.hpp"
Go to the source code of this file.
Classes | |
| class | tactiles::GenericTactiles< StatusType, CommandType > |
Namespaces | |
| namespace | tactiles |
Detailed Description
This is the main class for accessing the data from the tactiles.
- Date:
- Th Oct 20 10:06:14 2011
Copyright 2011 Shadow Robot Company Ltd.
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 2 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see <http://www.gnu.org/licenses/>.
Definition in file generic_tactiles.hpp.