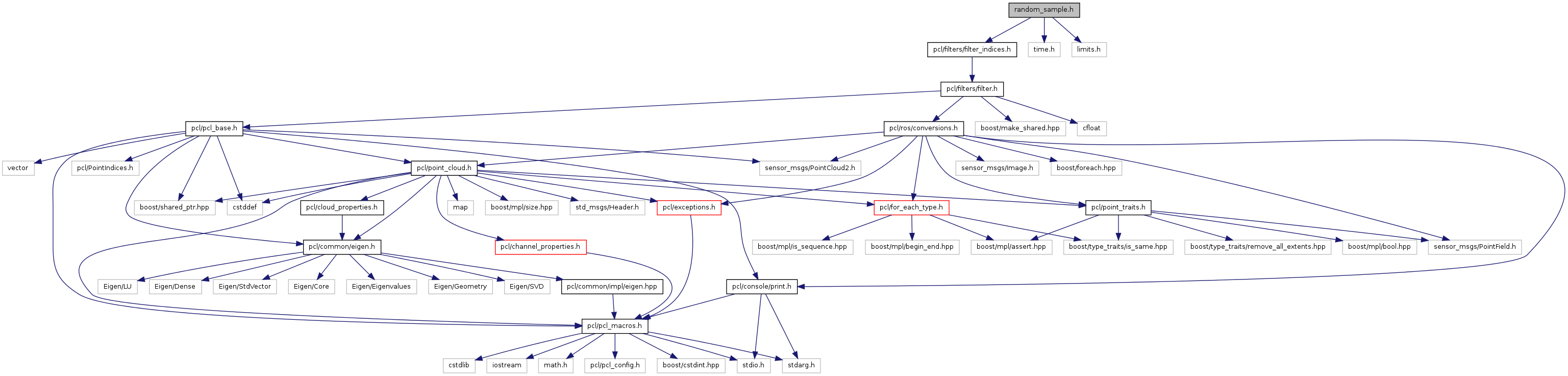
Include dependency graph for random_sample.h:
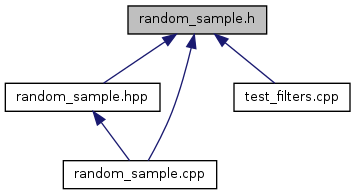
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl::RandomSample< PointT > |
| RandomSample applies a random sampling with uniform probability. Based off Algorithm A from the paper "Faster Methods for Random Sampling" by Jeffrey Scott Vitter. The algorithm runs in O(N) and results in sorted indices http://www.ittc.ku.edu/~jsv/Papers/Vit84.sampling.pdf More... | |
| class | pcl::RandomSample< sensor_msgs::PointCloud2 > |
| RandomSample applies a random sampling with uniform probability. More... | |
Namespaces | |
| namespace | pcl |