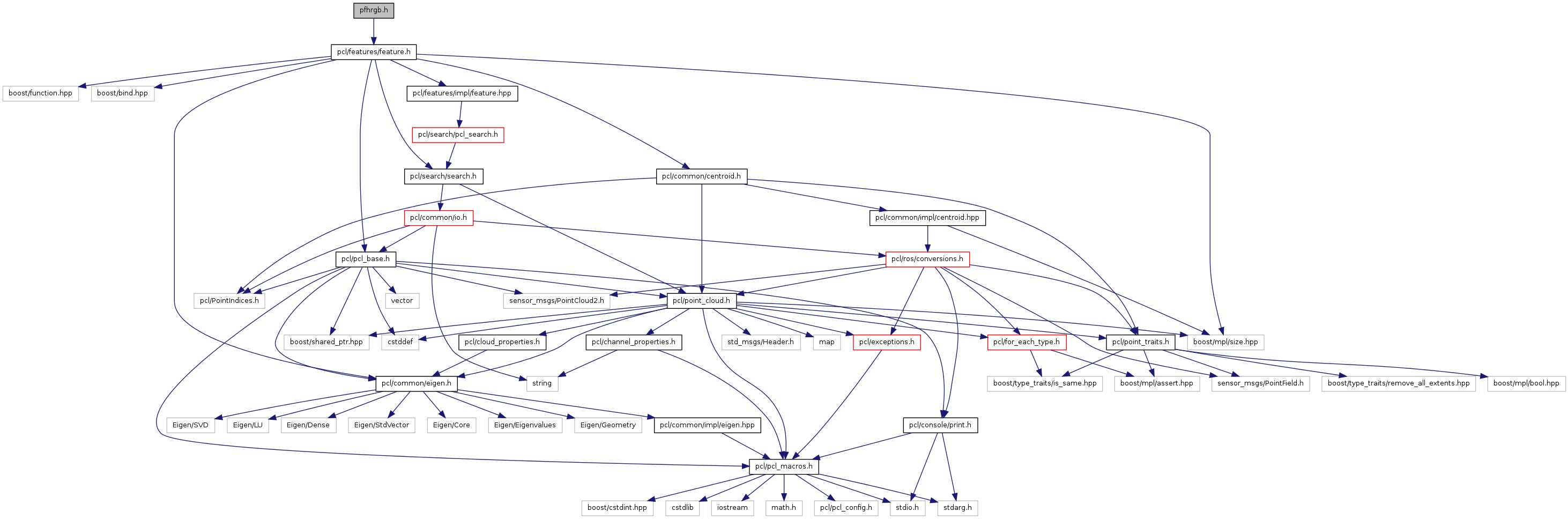
#include <pcl/features/feature.h>
Include dependency graph for pfhrgb.h:
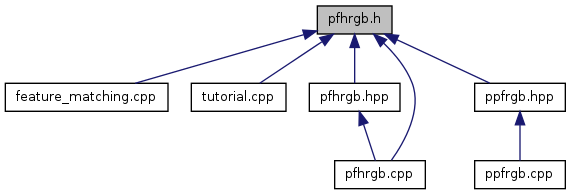
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl::PFHRGBEstimation< PointInT, PointNT, PointOutT > |
Namespaces | |
| namespace | pcl |
Functions | |
| PCL_EXPORTS bool | pcl::computeRGBPairFeatures (const Eigen::Vector4f &p1, const Eigen::Vector4f &n1, const Eigen::Vector4i &colors1, const Eigen::Vector4f &p2, const Eigen::Vector4f &n2, const Eigen::Vector4i &colors2, float &f1, float &f2, float &f3, float &f4, float &f5, float &f6, float &f7) |