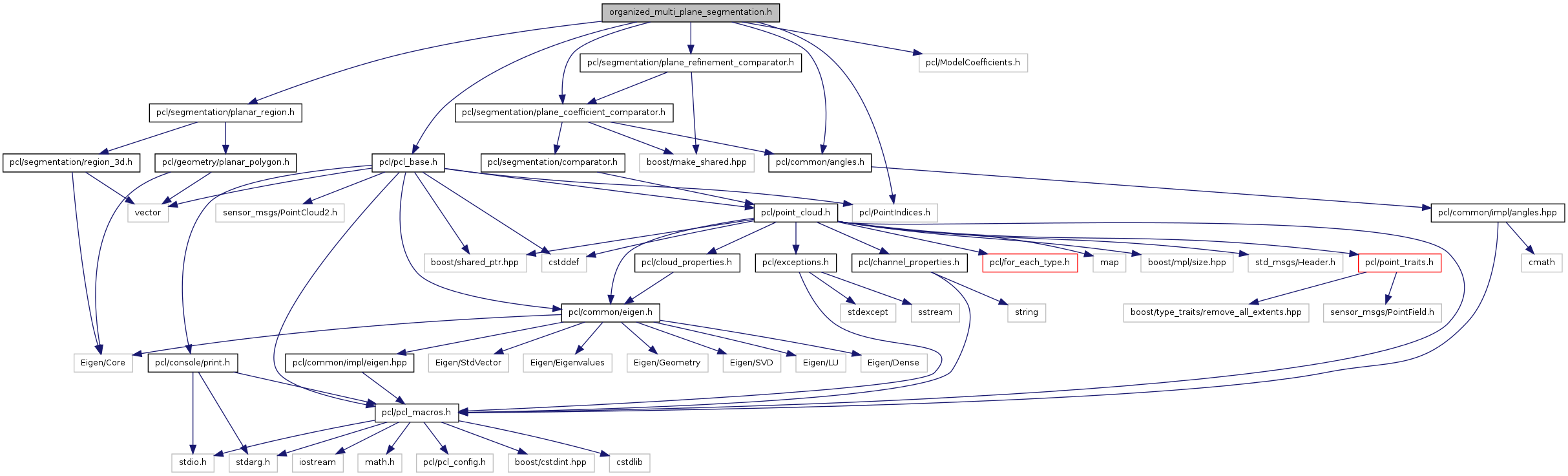
#include <pcl/segmentation/planar_region.h>#include <pcl/pcl_base.h>#include <pcl/common/angles.h>#include <pcl/PointIndices.h>#include <pcl/ModelCoefficients.h>#include <pcl/segmentation/plane_coefficient_comparator.h>#include <pcl/segmentation/plane_refinement_comparator.h>
Include dependency graph for organized_multi_plane_segmentation.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pcl::OrganizedMultiPlaneSegmentation< PointT, PointNT, PointLT > |
| OrganizedMultiPlaneSegmentation finds all planes present in the input cloud, and outputs a vector of plane equations, as well as a vector of point clouds corresponding to the inliers of each detected plane. Only planes with more than min_inliers points are detected. Templated on point type, normal type, and label type. More... | |
Namespaces | |
| namespace | pcl |