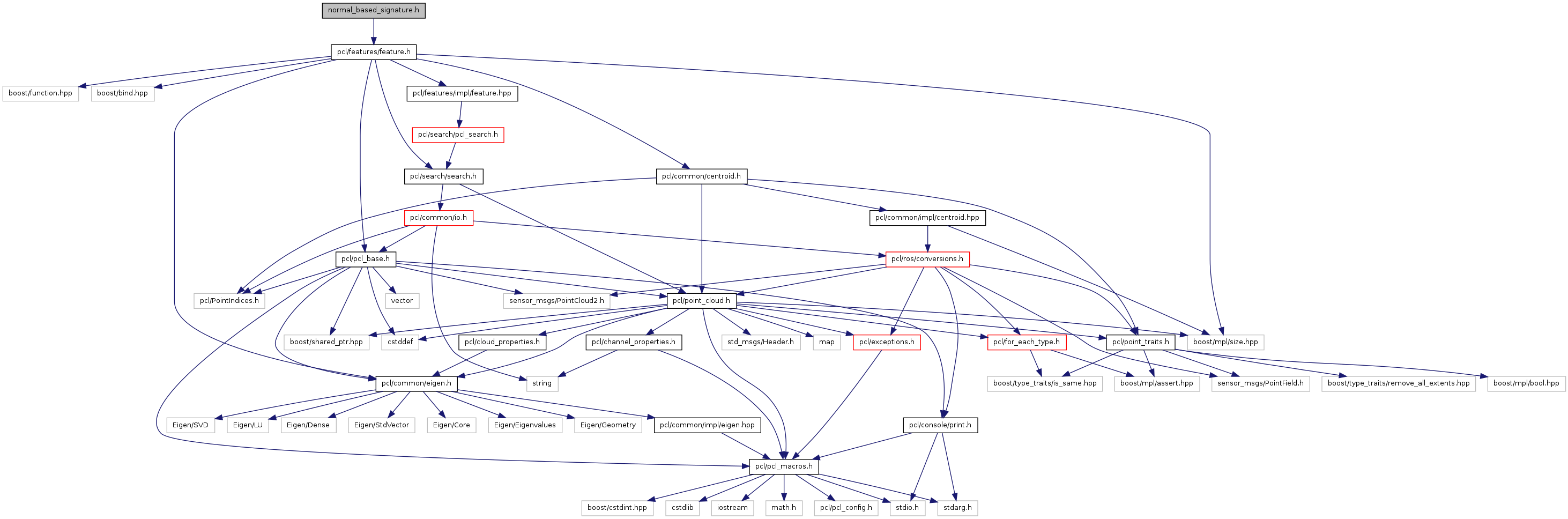
#include <pcl/features/feature.h>
Include dependency graph for normal_based_signature.h:
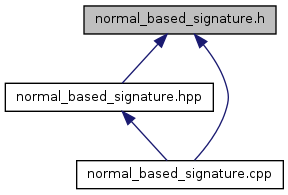
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl::NormalBasedSignatureEstimation< PointT, PointNT, PointFeature > |
| Normal-based feature signature estimation class. Obtains the feature vector by applying Discrete Cosine and Fourier Transforms on an NxM array of real numbers representing the projection distances of the points in the input cloud to a disc around the point of interest. Please consult the following publication for more details: Xinju Li and Igor Guskov Multi-scale features for approximate alignment of point-based surfaces Proceedings of the third Eurographics symposium on Geometry processing July 2005, Vienna, Austria. More... | |
Namespaces | |
| namespace | pcl |