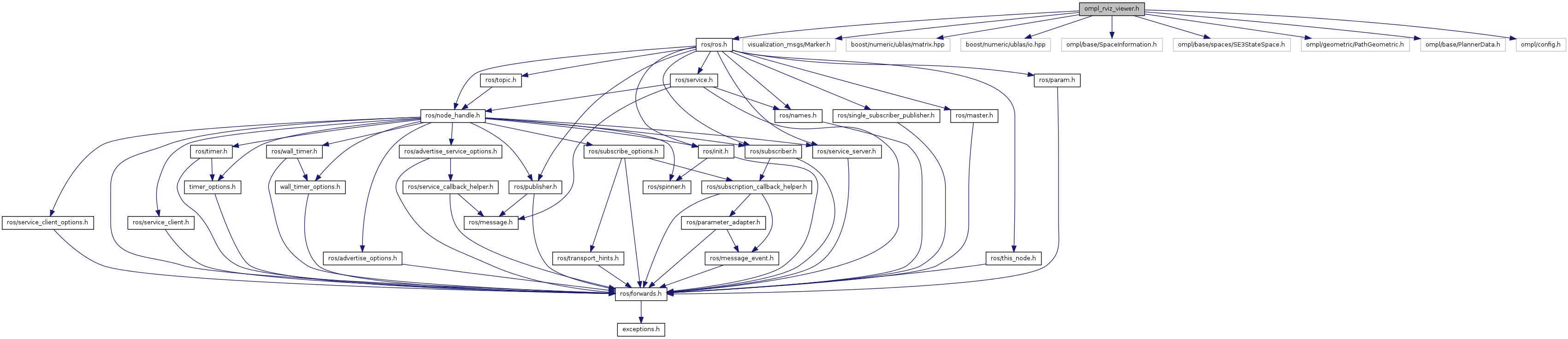
#include <ros/ros.h>#include <visualization_msgs/Marker.h>#include <boost/numeric/ublas/matrix.hpp>#include <boost/numeric/ublas/io.hpp>#include <ompl/base/SpaceInformation.h>#include <ompl/base/spaces/SE3StateSpace.h>#include <ompl/geometric/PathGeometric.h>#include <ompl/base/PlannerData.h>#include <ompl/config.h>
Include dependency graph for ompl_rviz_viewer.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ompl_rviz_viewer::OmplRvizViewer |
Namespaces | |
| namespace | ompl_rviz_viewer |
Typedefs | |
| typedef boost::shared_ptr < const OmplRvizViewer > | ompl_rviz_viewer::OmplRvizViewerConstPtr |
| typedef boost::shared_ptr < OmplRvizViewer > | ompl_rviz_viewer::OmplRvizViewerPtr |
Functions | |
| double | ompl_rviz_viewer::getCost (const geometry_msgs::Point &point, bnu::matrix< int > &cost) |
| double | ompl_rviz_viewer::getCostHeight (const geometry_msgs::Point &point, bnu::matrix< int > &cost) |
| int | ompl_rviz_viewer::nat_round (double x) |
Variables | |
| static const std::string | ompl_rviz_viewer::BASE_FRAME = "/world" |