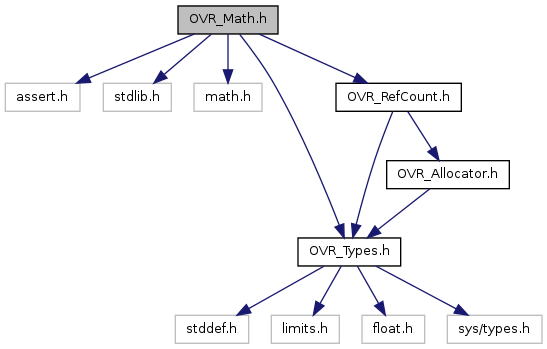
#include <assert.h>#include <stdlib.h>#include <math.h>#include "OVR_Types.h"#include "OVR_RefCount.h"
Include dependency graph for OVR_Math.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | OVR::Angle< T > |
| class | OVR::Math< Type > |
| class | OVR::Math< double > |
| class | OVR::Math< float > |
| class | OVR::Matrix4f |
| class | OVR::Plane< T > |
| class | OVR::Quat< T > |
| class | OVR::Vector2< T > |
| class | OVR::Vector3< T > |
| struct | OVR::WorldAxes |
Namespaces | |
| namespace | OVR |
Typedefs | |
| typedef Angle< double > | OVR::Angled |
| typedef Angle< float > | OVR::Anglef |
| typedef Math< double > | OVR::Mathd |
| typedef Math< float > | OVR::Mathf |
| typedef Plane< float > | OVR::Planef |
| typedef Quat< double > | OVR::Quatd |
| typedef Quat< float > | OVR::Quatf |
| typedef Vector2< double > | OVR::Vector2d |
| typedef Vector2< float > | OVR::Vector2f |
| typedef Vector3< double > | OVR::Vector3d |
| typedef Vector3< float > | OVR::Vector3f |
Enumerations | |
| enum | OVR::Axis { OVR::Axis_X = 0, OVR::Axis_Y = 1, OVR::Axis_Z = 2 } |
| enum | OVR::AxisDirection { OVR::Axis_Up = 2, OVR::Axis_Down = -2, OVR::Axis_Right = 1, OVR::Axis_Left = -1, OVR::Axis_In = 3, OVR::Axis_Out = -3 } |
| enum | OVR::HandedSystem { OVR::Handed_R = 1, OVR::Handed_L = -1 } |
| enum | OVR::RotateDirection { OVR::Rotate_CCW = 1, OVR::Rotate_CW = -1 } |
Functions | |
| template<class FT > | |
| FT | OVR::DegreeToRad (FT rads) |
| template<class FT > | |
| FT | OVR::RadToDegree (FT rads) |