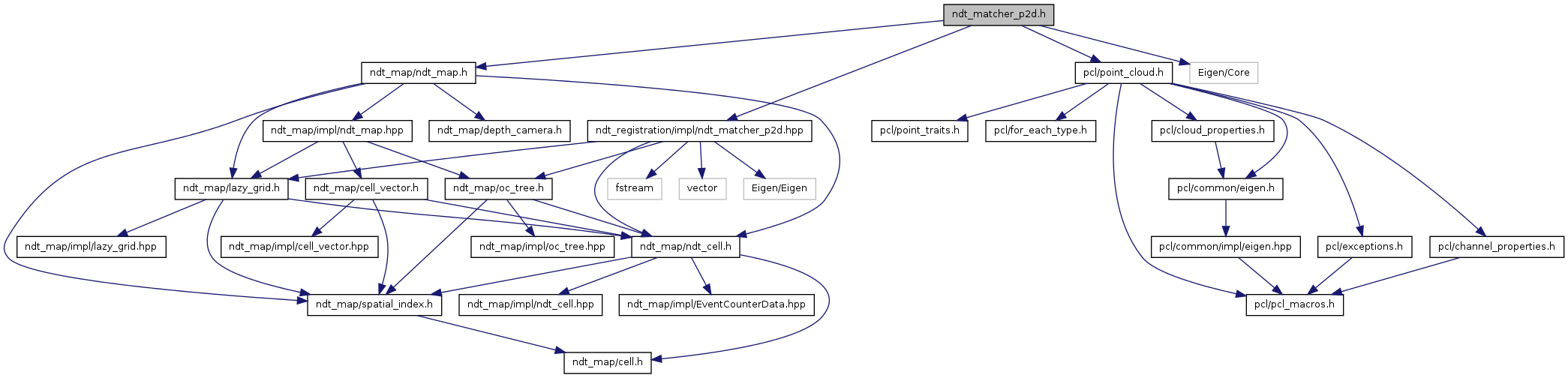
#include "ndt_map/ndt_map.h"#include "pcl/point_cloud.h"#include "Eigen/Core"#include <ndt_registration/impl/ndt_matcher_p2d.hpp>
Include dependency graph for ndt_matcher_p2d.h:
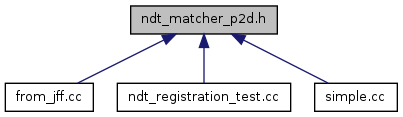
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | lslgeneric::NDTMatcherP2D< PointSource, PointTarget >::MoreThuente |
| class | lslgeneric::NDTMatcherP2D< PointSource, PointTarget > |
Namespaces | |
| namespace | lslgeneric |
NDT-to-NDT based localization using 3D NDT map and observation, but the pose is estimated in 2D (x,y,yaw) This wraps the NDTMatcherD2D_2D and provides Frame-to-Model registration, that is, map based localization estimate. | |