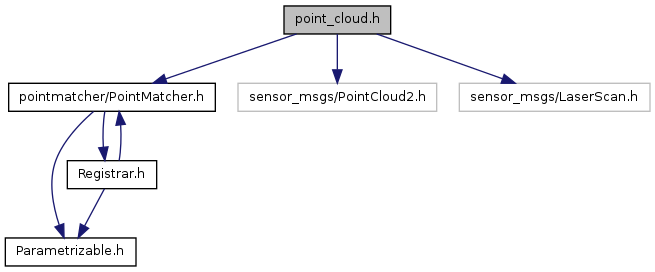
#include "pointmatcher/PointMatcher.h"#include "sensor_msgs/PointCloud2.h"#include "sensor_msgs/LaserScan.h"
Include dependency graph for point_cloud.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | PointMatcher_ros |
| namespace | ros |
| namespace | tf |
Functions | |
| template<typename T > | |
| sensor_msgs::PointCloud2 | PointMatcher_ros::pointMatcherCloudToRosMsg (const typename PointMatcher< T >::DataPoints &pmCloud, const std::string &frame_id, const ros::Time &stamp) |
| template<typename T > | |
| PointMatcher< T >::DataPoints | PointMatcher_ros::rosMsgToPointMatcherCloud (const sensor_msgs::PointCloud2 &rosMsg) |
| Transform a ROS PointCloud2 message into a libpointmatcher point cloud. | |
| template<typename T > | |
| PointMatcher< T >::DataPoints | PointMatcher_ros::rosMsgToPointMatcherCloud (const sensor_msgs::LaserScan &rosMsg, const tf::TransformListener *listener=0, const std::string &fixed_frame="/world", const bool force3D=false, const bool addTimestamps=false) |