#include <imu_model.h>
Public Types | |
| enum | StateIndex { BIAS_ACCEL_X = 0, BIAS_ACCEL_Y, BIAS_ACCEL_Z } |
Public Member Functions | |
| AccelerometerModel () | |
| ConstStateVectorSegment | getBias () const |
| virtual void | getStateJacobian (SystemMatrix &A1, CrossSystemMatrix &A01, const State &state, bool init) |
| virtual void | getSystemNoise (NoiseVariance &Q, const State &state, bool init) |
| virtual bool | init (PoseEstimation &estimator, State &state) |
| SubState & | sub (State &state) const |
| const SubState & | sub (const State &state) const |
| virtual | ~AccelerometerModel () |
Private Attributes | |
| double | acceleration_drift_ |
| double | acceleration_stddev_ |
| SubStatePtr | drift_ |
Detailed Description
Definition at line 67 of file imu_model.h.
Member Enumeration Documentation
Definition at line 70 of file imu_model.h.
Constructor & Destructor Documentation
Definition at line 106 of file imu_model.cpp.
Definition at line 114 of file imu_model.cpp.
Member Function Documentation
| ConstStateVectorSegment hector_pose_estimation::AccelerometerModel::getBias | ( | ) | const [inline] |
Definition at line 89 of file imu_model.h.
| void hector_pose_estimation::AccelerometerModel::getStateJacobian | ( | SystemMatrix & | A1, |
| CrossSystemMatrix & | A01, | ||
| const State & | state, | ||
| bool | init | ||
| ) | [virtual] |
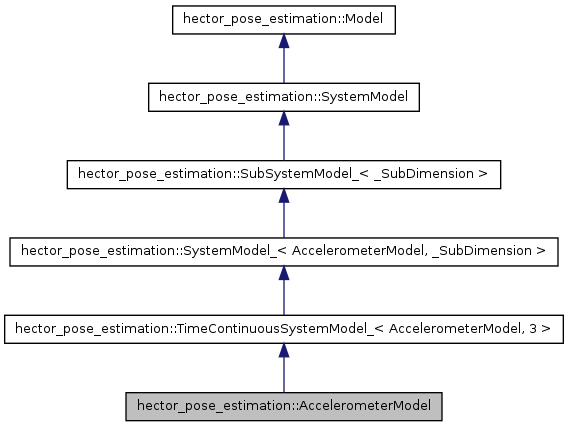
Reimplemented from hector_pose_estimation::TimeContinuousSystemModel_< AccelerometerModel, 3 >.
Definition at line 131 of file imu_model.cpp.
| void hector_pose_estimation::AccelerometerModel::getSystemNoise | ( | NoiseVariance & | Q, |
| const State & | state, | ||
| bool | init | ||
| ) | [virtual] |
Reimplemented from hector_pose_estimation::TimeContinuousSystemModel_< AccelerometerModel, 3 >.
Definition at line 123 of file imu_model.cpp.
| bool hector_pose_estimation::AccelerometerModel::init | ( | PoseEstimation & | estimator, |
| State & | state | ||
| ) | [virtual] |
Reimplemented from hector_pose_estimation::Model.
Definition at line 117 of file imu_model.cpp.
| SubState& hector_pose_estimation::AccelerometerModel::sub | ( | State & | state | ) | const [inline] |
Reimplemented from hector_pose_estimation::SystemModel_< AccelerometerModel, _SubDimension >.
Definition at line 79 of file imu_model.h.
| const SubState& hector_pose_estimation::AccelerometerModel::sub | ( | const State & | state | ) | const [inline] |
Reimplemented from hector_pose_estimation::SystemModel_< AccelerometerModel, _SubDimension >.
Definition at line 80 of file imu_model.h.
Member Data Documentation
double hector_pose_estimation::AccelerometerModel::acceleration_drift_ [private] |
Definition at line 94 of file imu_model.h.
double hector_pose_estimation::AccelerometerModel::acceleration_stddev_ [private] |
Definition at line 93 of file imu_model.h.
Definition at line 92 of file imu_model.h.
The documentation for this class was generated from the following files: