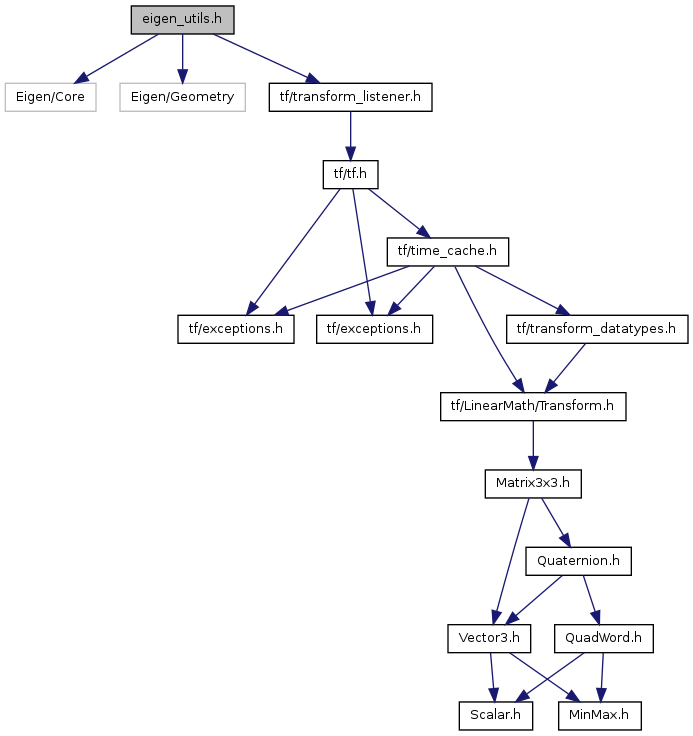
Include dependency graph for eigen_utils.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | eigen_utils |
Functions | |
| Eigen::Affine3d | eigen_utils::direct_exponential_map (const Eigen::VectorXd &v, double delta_t) |
| bool | eigen_utils::getTransform (const tf::TransformListener &listener, const std::string &target, const std::string source, Eigen::Affine3d &tMs, const ros::Time ×tamp=ros::Time::now(), const ros::Duration &timeout=ros::Duration(5.0)) |
| void | eigen_utils::pseudoinverse (const Eigen::MatrixXd &M, Eigen::MatrixXd &Minv, double tolerance=1.e-06) |
| Eigen::MatrixXd | eigen_utils::pseudoinverse (const Eigen::MatrixXd &M, double tolerance=1.e-06) |
| void | eigen_utils::transformToPoseVector (const Eigen::Affine3d &M, Eigen::VectorXd &pose) |
| Eigen::VectorXd | eigen_utils::transformToPoseVector (const Eigen::Affine3d &M) |
| Eigen::Affine3d | eigen_utils::UThetaToAffine3d (const Eigen::Vector3d &u) |