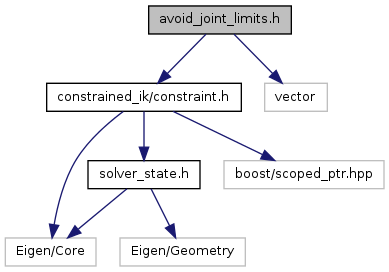
Include dependency graph for avoid_joint_limits.h:
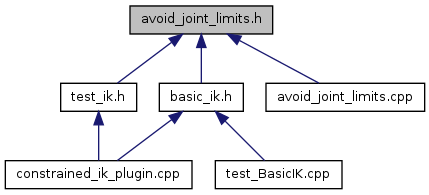
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | constrained_ik::constraints::AvoidJointLimits |
| Constraint class to avoid joint position limits Using cubic velocity ramp, it pushes each joint away from its limits, with a maximimum velocity of 2*threshold*(joint range). Only affects joints that are within theshold of joint limit. More... | |
| struct | constrained_ik::constraints::AvoidJointLimits::LimitsT |
Namespaces | |
| namespace | constrained_ik |
| namespace | constrained_ik::constraints |