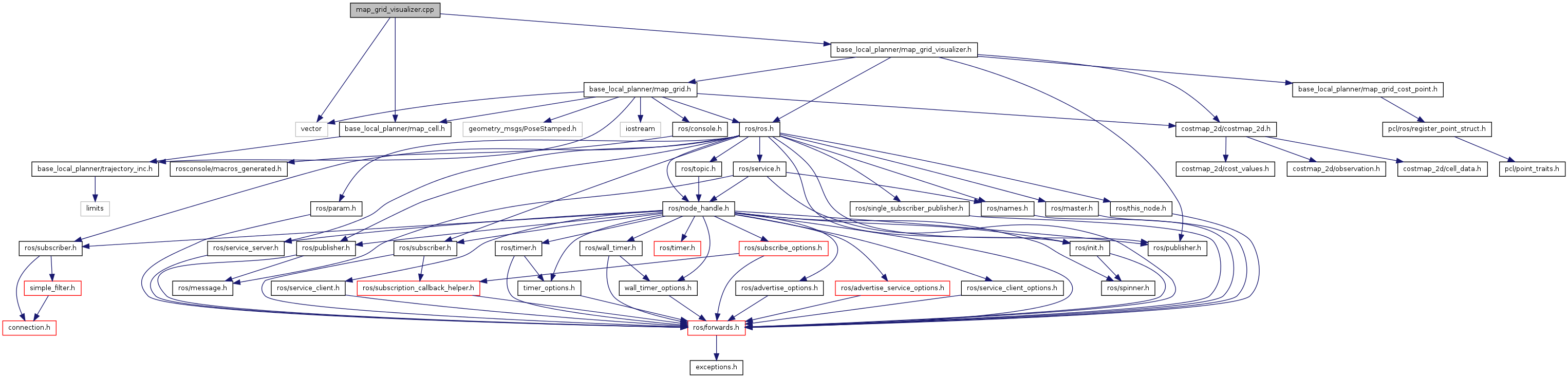
#include <base_local_planner/map_grid_visualizer.h>#include <base_local_planner/map_cell.h>#include <vector>
Include dependency graph for map_grid_visualizer.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | base_local_planner |
#include <base_local_planner/map_grid_visualizer.h>#include <base_local_planner/map_cell.h>#include <vector>Go to the source code of this file.
Namespaces | |
| namespace | base_local_planner |