ART odometry estimate functions. More...
#include <math.h>#include <art_msgs/ArtVehicle.h>#include <art/epsilon.h>#include <art_map/euclidean_distance.h>#include <art_map/coordinates.h>#include <art_nav/estimate.h>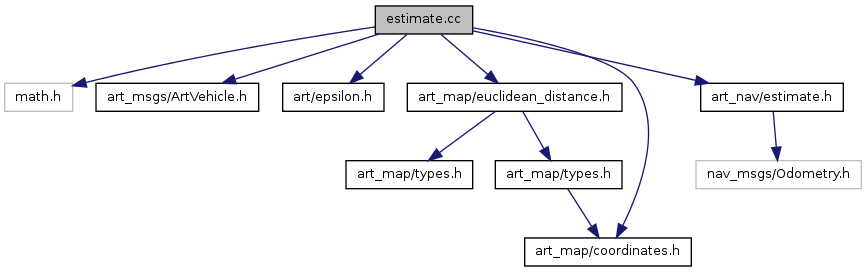
Go to the source code of this file.
Namespaces | |
| namespace | Estimate |
Functions | |
| void | Estimate::control_pose (const nav_msgs::Odometry &odom, ros::Time est_time, nav_msgs::Odometry &est) |
| void | Estimate::front_axle_pose (const nav_msgs::Odometry &odom, nav_msgs::Odometry &est) |
| void | Estimate::front_bumper_pose (const nav_msgs::Odometry &odom, nav_msgs::Odometry &est) |
ART odometry estimate functions.
Definition in file estimate.cc.

