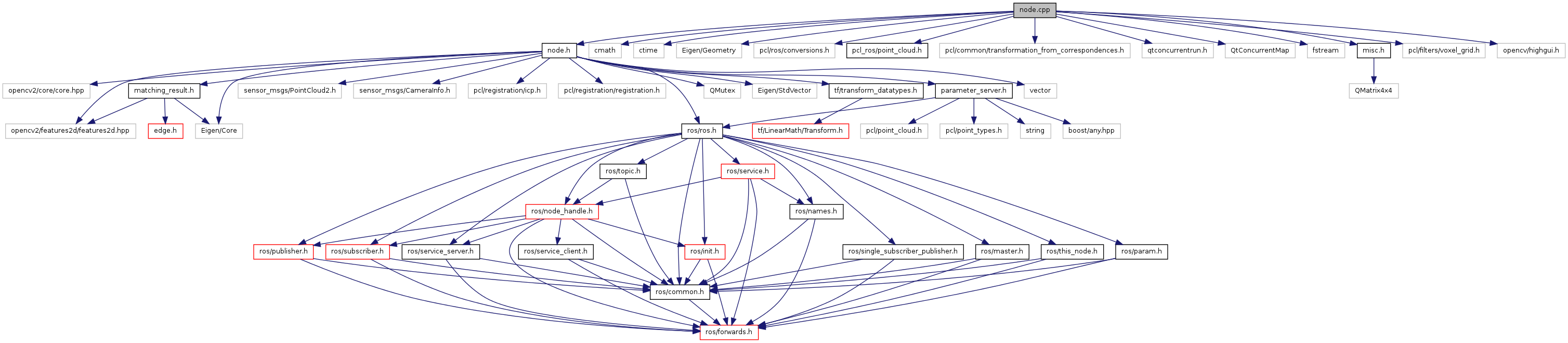
#include "node.h"#include <cmath>#include <ctime>#include <Eigen/Geometry>#include "pcl/ros/conversions.h"#include <pcl_ros/point_cloud.h>#include <pcl/common/transformation_from_correspondences.h>#include <qtconcurrentrun.h>#include <QtConcurrentMap>#include <fstream>#include "misc.h"#include <pcl/filters/voxel_grid.h>#include <opencv/highgui.h>