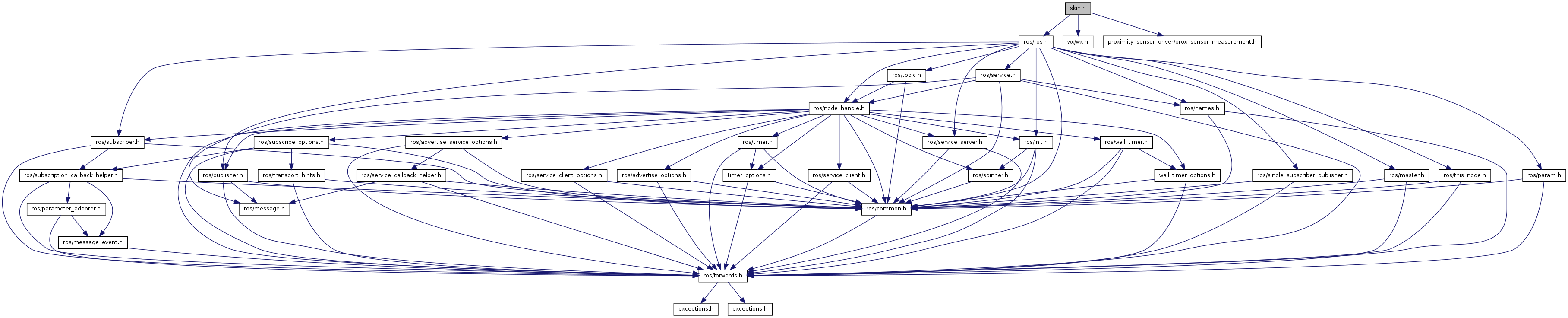
#include <ros/ros.h>#include <wx/wx.h>#include <proximity_sensor_driver/prox_sensor_measurement.h>
Include dependency graph for skin.h:
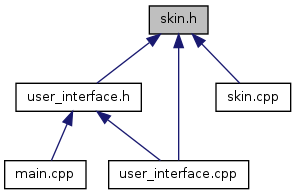
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Skin |
| A Class to subscribe the data provided by the publisher node (skin_driver) More... | |
Namespaces | |
| namespace | skind_def |
A namespace with constants. | |
Variables | |
| const int | skind_def::anz_byte_per_sensor = 8 |
| const int | skind_def::max_sensor_number = 192 |