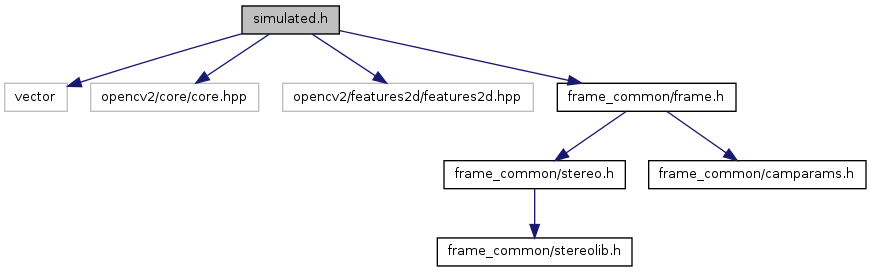
#include <vector>#include <opencv2/core/core.hpp>#include <opencv2/features2d/features2d.hpp>#include <frame_common/frame.h>
Include dependency graph for simulated.h:
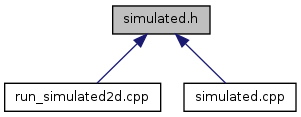
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pe::CameraSimulator |
| class | pe::CircleCameraSimulator |
Namespaces | |
| namespace | pe |
Functions | |
| void | pe::addLinkNoise (std::vector< cv::DMatch > &indices, double ratio=0.05) |
| void | pe::calcVisible (const cv::Mat &intrinsics, const cv::Mat &R, const cv::Mat &T, const std::vector< cv::Point3f > &objectPoints, const std::vector< cv::Point2f > &imagePoints, std::vector< bool > &visible) |
| void | pe::generate3DPointCloud (std::vector< cv::Point3f > &points, cv::Point3f pmin=cv::Point3f(-1,-1, 5), cv::Point3f pmax=cv::Point3f(1, 1, 10)) |
| void | pe::generateCube (std::vector< cv::Point3f > &cloud) |
| void | pe::generateData (cv::Mat &intrinsics, cv::Mat &R, cv::Mat &T, std::vector< cv::KeyPoint > &points1, std::vector< cv::KeyPoint > &points2, std::vector< int > &indices, std::vector< cv::Point3f > &points) |
| void | pe::generatePlanarObject (std::vector< cv::Point3f > &points, cv::Point3f N=cv::Point3f(0.0f, 0.0f, 1.0f), float d=10.0f) |
| void | pe::generateProjections (const cv::Mat &intrinsics, const cv::Mat &rvec, const cv::Mat &tvec, const std::vector< cv::Point3f > &cloud, std::vector< cv::KeyPoint > &keypoints) |
| void | pe::generateRing (std::vector< cv::Point3f > &cloud, cv::Point3f center=cv::Point3f(0, 0, 0)) |