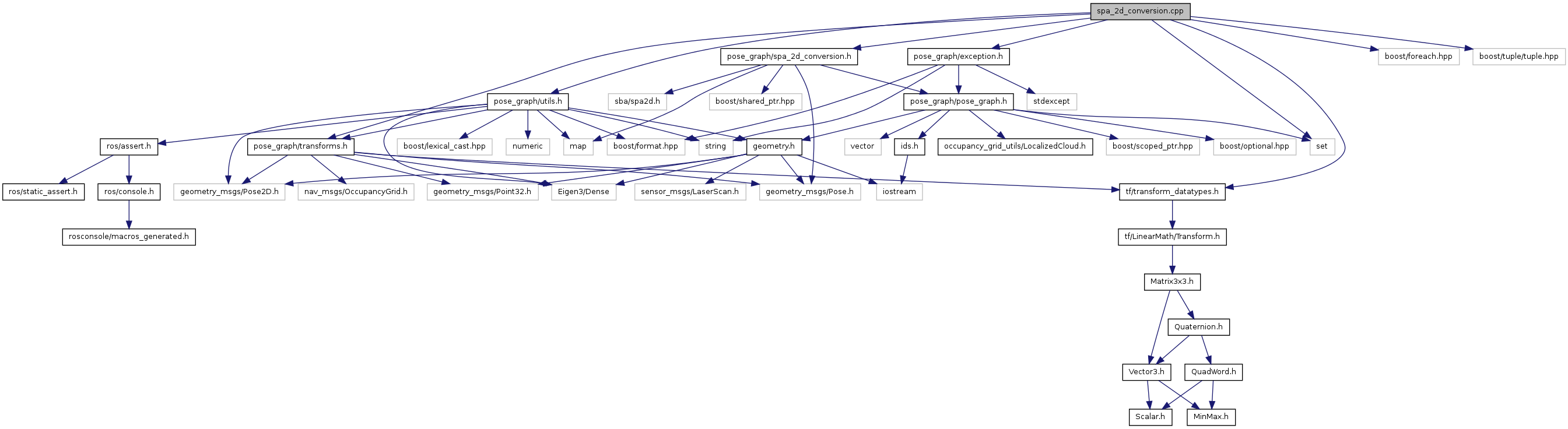
#include <pose_graph/spa_2d_conversion.h>#include <pose_graph/transforms.h>#include <pose_graph/exception.h>#include <pose_graph/utils.h>#include <tf/transform_datatypes.h>#include <boost/foreach.hpp>#include <boost/tuple/tuple.hpp>#include <set>
Include dependency graph for spa_2d_conversion.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | pose_graph |
Typedefs | |
| typedef std::pair< NodeId, NodeId > | pose_graph::NodePair |
Functions | |
| geometry_msgs::Pose | pose_graph::getNodePose (const sba::Node2d &n) |
| Return the Pose corresponding to a spa node. | |
| double | pose_graph::getYaw (const Quaterniond &q) |
| Node2d | pose_graph::makeNode (const double x, const double y, const double theta) |
| Con2dP2 | pose_graph::makeSpa2DConstraint (const PoseConstraint &constraint) |
| NodePoseMap | pose_graph::optimizeGraph2D (const PoseGraph &g) |
| Optimize a graph using SPA 2d. | |
| Spa2DConversionResult | pose_graph::poseGraphToSpa2D (const PoseGraph &pose_graph) |
| Convert a pose graph into a SysSPA object and return it. | |