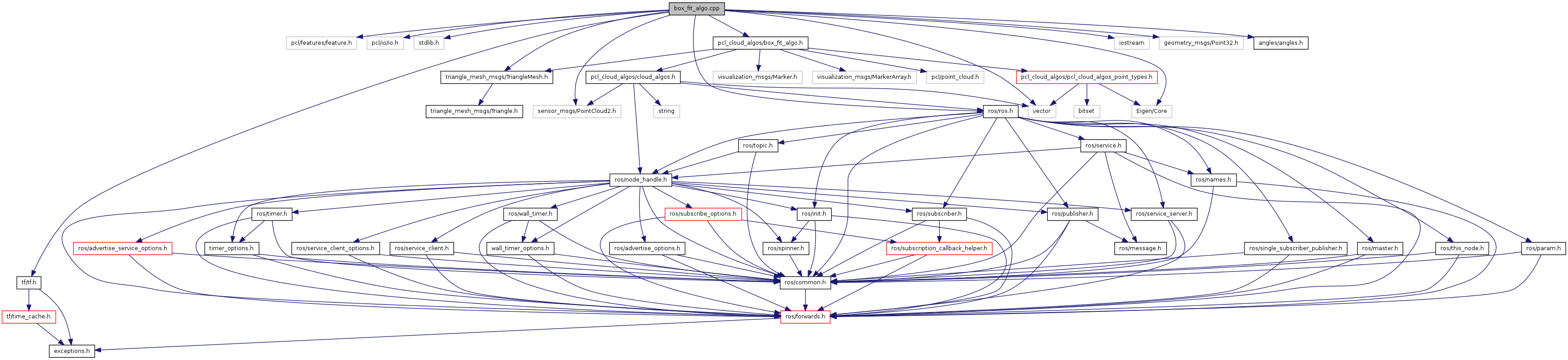
#include <pcl/features/feature.h>#include <pcl/io/io.h>#include <stdlib.h>#include <vector>#include <iostream>#include <sensor_msgs/PointCloud2.h>#include <geometry_msgs/Point32.h>#include <ros/ros.h>#include <pcl_cloud_algos/box_fit_algo.h>#include <tf/tf.h>#include <Eigen/Core>#include <angles/angles.h>#include <triangle_mesh_msgs/TriangleMesh.h>