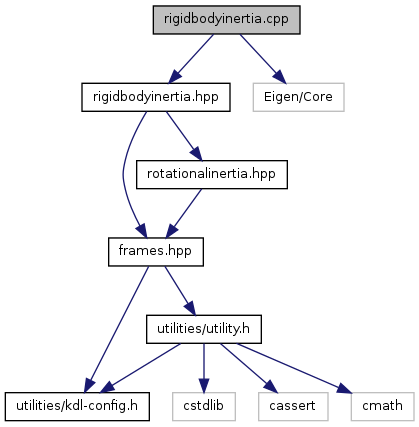
Include dependency graph for rigidbodyinertia.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | KDL |
Functions | |
| RigidBodyInertia | KDL::operator* (double a, const RigidBodyInertia &I) |
| Wrench | KDL::operator* (const RigidBodyInertia &I, const Twist &t) |
| RigidBodyInertia | KDL::operator* (const Frame &T, const RigidBodyInertia &I) |
| RigidBodyInertia | KDL::operator* (const Rotation &M, const RigidBodyInertia &I) |
| RigidBodyInertia | KDL::operator+ (const RigidBodyInertia &Ia, const RigidBodyInertia &Ib) |
Variables | |
| static const bool | KDL::mhi = true |