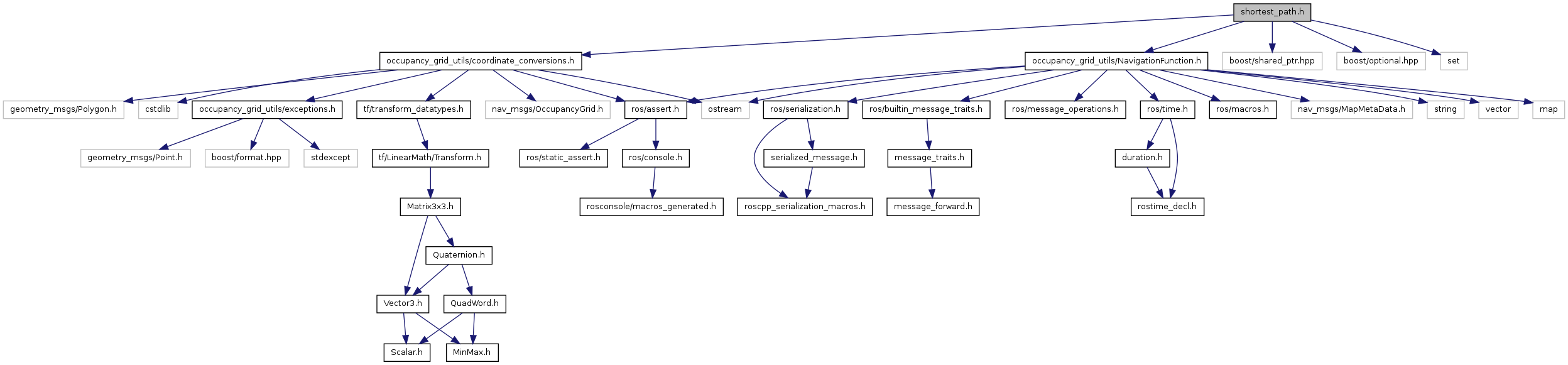
#include <occupancy_grid_utils/coordinate_conversions.h>#include <occupancy_grid_utils/NavigationFunction.h>#include <boost/shared_ptr.hpp>#include <boost/optional.hpp>#include <set>
Include dependency graph for shortest_path.h:
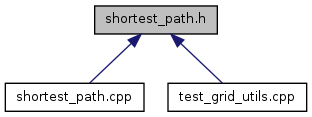
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | occupancy_grid_utils::TerminationCondition |
| Termination condition for shortest path search max_dist is a distance such that as soon as we see a cell with greater than this distance, we stop goals is a set such that once we've expanded all the cells in this set, we stop. More... | |
Namespaces | |
| namespace | occupancy_grid_utils |
Typedefs | |
| typedef std::pair< Path, double > | occupancy_grid_utils::AStarResult |
| typedef std::set< Cell > | occupancy_grid_utils::Cells |
| typedef std::vector< Cell > | occupancy_grid_utils::Path |
| typedef boost::shared_ptr < const ShortestPathResult > | occupancy_grid_utils::ResultPtr |
Functions | |
| boost::optional< double > | occupancy_grid_utils::distance (ResultPtr shortest_path_result, const Cell &dest) |
| From result of single-source shortest paths, extract distance to some destination. | |
| boost::optional< Path > | occupancy_grid_utils::extractPath (ResultPtr shortest_path_result, const Cell &dest) |
| Extract a path from the result of single-source shortest paths. | |
| nav_msgs::OccupancyGrid::Ptr | occupancy_grid_utils::inflateObstacles (const nav_msgs::OccupancyGrid &g, const double r) |
| Inflate obstacles in a grid. | |
| boost::optional< AStarResult > | occupancy_grid_utils::shortestPath (const nav_msgs::OccupancyGrid &g, const Cell &src, const Cell &dest) |
| A* using Manhattan distance cost and heuristic, with only horizontal and vertical neighbors. | |
| ResultPtr | occupancy_grid_utils::shortestPathResultFromMessage (const NavigationFunction &msg) |
| Convert a shortest path result from a ros message. | |
| NavigationFunction | occupancy_grid_utils::shortestPathResultToMessage (ResultPtr res) |
| Convert a shortest path result to a ros message. | |
| ResultPtr | occupancy_grid_utils::singleSourceShortestPaths (const nav_msgs::OccupancyGrid &g, const Cell &src) |
| Single source Dijkstra's algorithm. | |
| ResultPtr | occupancy_grid_utils::singleSourceShortestPaths (const nav_msgs::OccupancyGrid &g, const Cell &src, const TerminationCondition &term) |
| Single source Dijkstra's algorithm. | |
Detailed Description
Shortest paths in occupancy grids
Definition in file shortest_path.h.