#include <mpc/dynamics.h>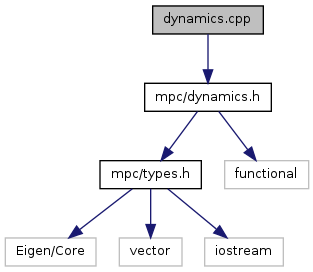
Go to the source code of this file.
Namespaces | |
| namespace | MPC |
Functions | |
| float | MPC::dynamicsAndCost (const VectorT &x, const VectorT &u) |
| void | MPC::dynamicsAndCost (const VectorT &x, const VectorT &u, VectorT &xNew, float &cNew) |
| void | MPC::dynamicsAndCost (const VectorT &x, const VectorT &u, MatrixT::ColXpr xNew, float &cNew) |
| void | MPC::dynamicsAndCost (Trajectory &t) |
| void | MPC::dynamicsAndCostDerivative (Trajectory &t, TrajectoryDeriv &d) |
| bool | MPC::setCostFunction (CostFunction f, CostFunctionD fd) |
| bool | MPC::setDynamicFunction (Dynamics f, DynamicsD fd) |

