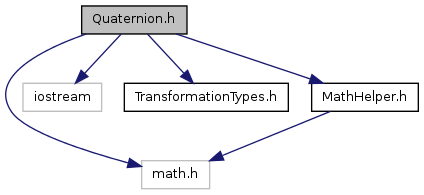
Include dependency graph for Quaternion.h:
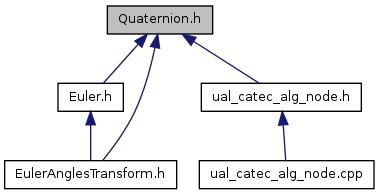
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | rotateOp::Quaternion |
| This class defines a quaternion. A quaternion is a number system that extends the complex number. Quaternions are used in particular for calculations involving three-dimmensional space. Quaternions are been represented in this class as a scalar and a vector: [w, (x,y,z)]. More... | |
Namespaces | |
| namespace | rotateOp |