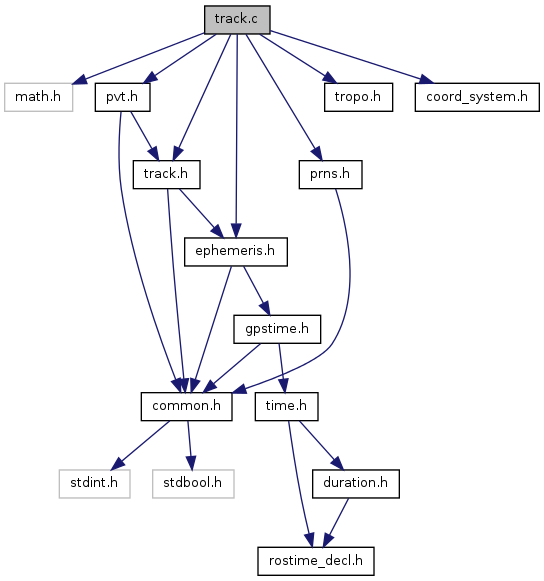
#include <math.h>#include "pvt.h"#include "prns.h"#include "track.h"#include "ephemeris.h"#include "tropo.h"#include "coord_system.h"
Include dependency graph for track.c:
Go to the source code of this file.
Functions | |
| void | calc_loop_gains (float bw, float zeta, float k, float loop_freq, float *pgain, float *igain) |
| void | calc_navigation_measurement (u8 n_channels, channel_measurement_t meas[], navigation_measurement_t nav_meas[], double nav_time, ephemeris_t ephemerides[]) |
| void | calc_navigation_measurement_ (u8 n_channels, channel_measurement_t *meas[], navigation_measurement_t *nav_meas[], double nav_time, ephemeris_t *ephemerides[]) |
| float | cn0_est (cn0_est_state_t *s, float I) |
| void | cn0_est_init (cn0_est_state_t *s, float bw, float cn0_0, float cutoff_freq, float loop_freq) |
| void | comp_tl_init (comp_tl_state_t *s, float loop_freq, float code_freq, float code_bw, float code_zeta, float code_k, float carr_freq, float carr_bw, float carr_zeta, float carr_k, float tau, float cpc, u32 sched) |
| void | comp_tl_update (comp_tl_state_t *s, correlation_t cs[3]) |
| float | costas_discriminator (float I, float Q) |
| float | dll_discriminator (correlation_t cs[3]) |
| void | simple_lf_init (simple_lf_state_t *s, float y0, float pgain, float igain) |
| float | simple_lf_update (simple_lf_state_t *s, float error) |
| void | simple_tl_init (simple_tl_state_t *s, float loop_freq, float code_freq, float code_bw, float code_zeta, float code_k, float carr_freq, float carr_bw, float carr_zeta, float carr_k) |
| void | simple_tl_update (simple_tl_state_t *s, correlation_t cs[3]) |