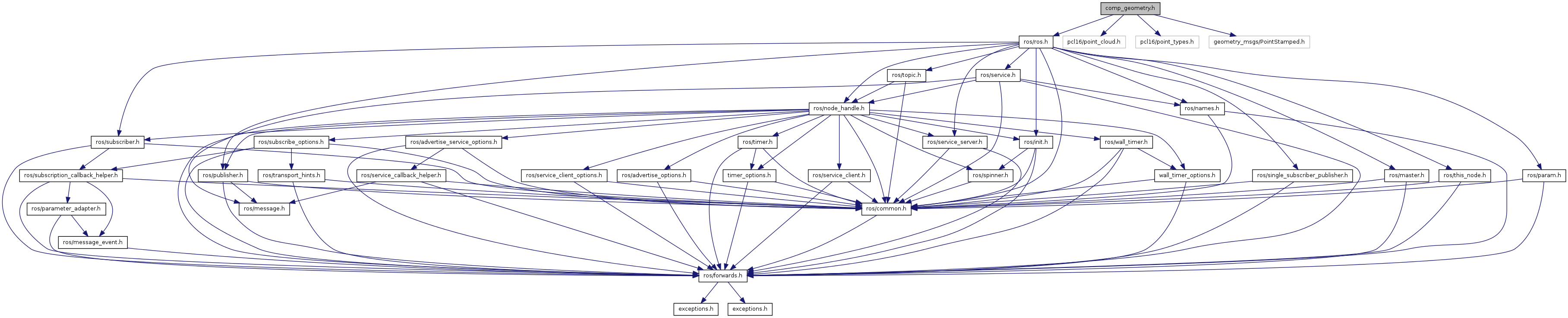
#include <ros/ros.h>#include <pcl16/point_cloud.h>#include <pcl16/point_types.h>#include <geometry_msgs/PointStamped.h>
Include dependency graph for comp_geometry.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | cpl_visual_features |
Functions | |
| static double | cpl_visual_features::dist (pcl16::PointXYZ a, pcl16::PointXYZ b) |
| static double | cpl_visual_features::dist (pcl16::PointXYZ a, geometry_msgs::Point b) |
| static double | cpl_visual_features::dist (geometry_msgs::Point b, pcl16::PointXYZ a) |
| bool | cpl_visual_features::lineLineIntersection2D (pcl16::PointXYZ a1, pcl16::PointXYZ a2, pcl16::PointXYZ b1, pcl16::PointXYZ b2, pcl16::PointXYZ &intersection) |
| bool | cpl_visual_features::lineSegmentIntersection2D (pcl16::PointXYZ a1, pcl16::PointXYZ a2, pcl16::PointXYZ b1, pcl16::PointXYZ b2, pcl16::PointXYZ &intersection) |
| bool | cpl_visual_features::pointIsBetweenOthers (pcl16::PointXYZ &pt, pcl16::PointXYZ &x1, pcl16::PointXYZ &x2) |
| double | cpl_visual_features::pointLineDistance2D (pcl16::PointXYZ &pt, pcl16::PointXYZ &a, pcl16::PointXYZ &b) |
| static double | cpl_visual_features::sqrDist (Eigen::Vector3f &a, pcl16::PointXYZ &b) |
| static double | cpl_visual_features::sqrDist (Eigen::Vector4f &a, Eigen::Vector4f &b) |
| static double | cpl_visual_features::sqrDist (pcl16::PointXYZ a, pcl16::PointXYZ b) |
| static double | cpl_visual_features::sqrDistXY (pcl16::PointXYZ a, pcl16::PointXYZ b) |