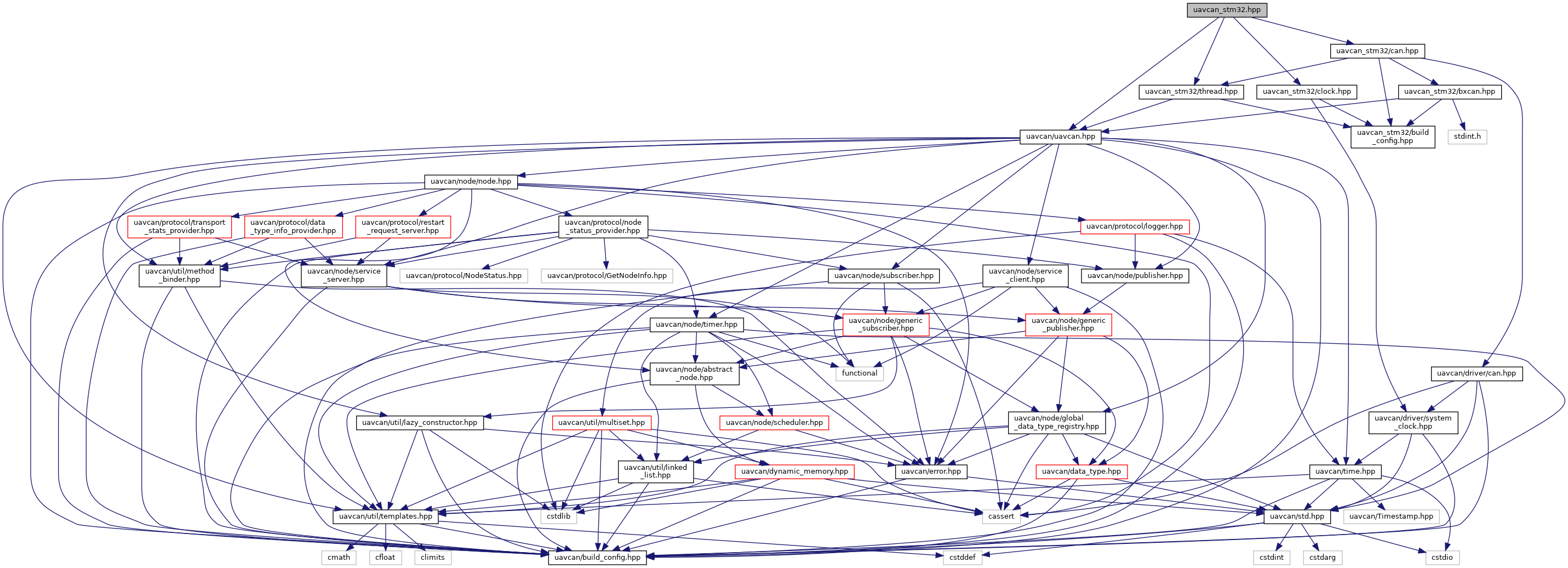
#include <uavcan/uavcan.hpp>#include <uavcan_stm32/thread.hpp>#include <uavcan_stm32/clock.hpp>#include <uavcan_stm32/can.hpp>
Include dependency graph for uavcan_stm32.hpp:
#include <uavcan/uavcan.hpp>#include <uavcan_stm32/thread.hpp>#include <uavcan_stm32/clock.hpp>#include <uavcan_stm32/can.hpp>