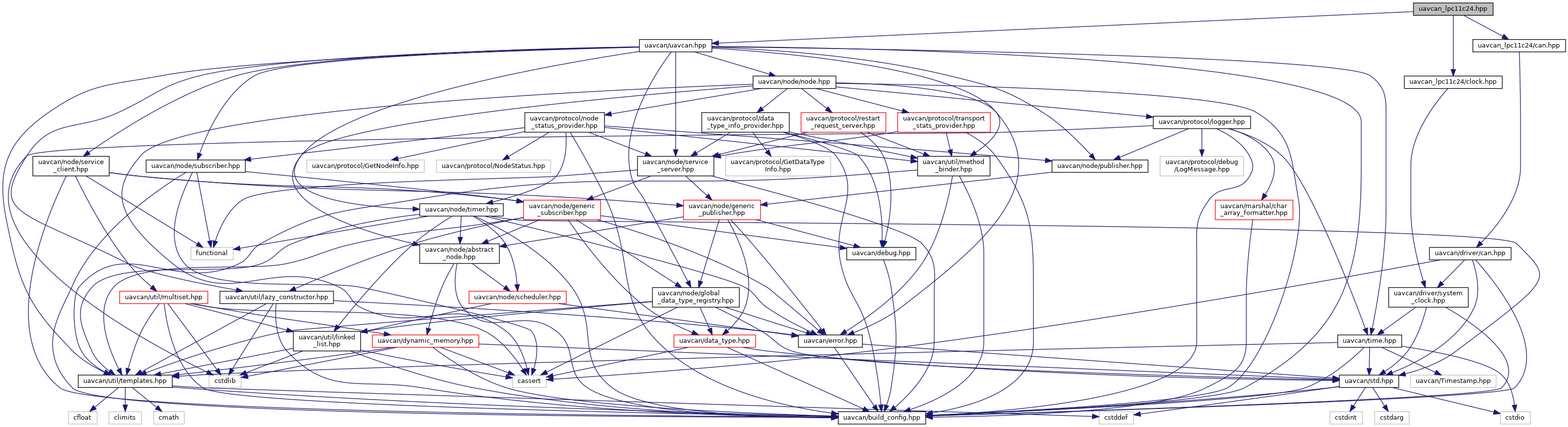
#include <uavcan/uavcan.hpp>#include <uavcan_lpc11c24/can.hpp>#include <uavcan_lpc11c24/clock.hpp>
Include dependency graph for uavcan_lpc11c24.hpp:
This graph shows which files directly or indirectly include this file:
#include <uavcan/uavcan.hpp>#include <uavcan_lpc11c24/can.hpp>#include <uavcan_lpc11c24/clock.hpp>