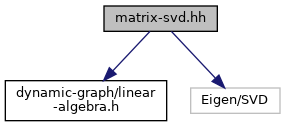
Include dependency graph for matrix-svd.hh:
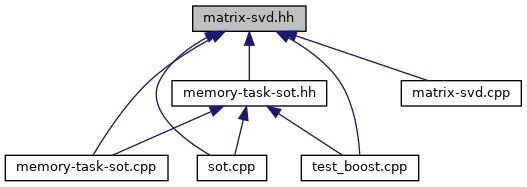
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| dynamicgraph | |
Typedefs | |
| typedef Eigen::JacobiSVD< Matrix > | dynamicgraph::SVD_t |
Functions | |
| void | dynamicgraph::dampedInverse (const Matrix &_inputMatrix, Matrix &_inverseMatrix, const double threshold=1e-6) |
| void | dynamicgraph::dampedInverse (const Matrix &_inputMatrix, Matrix &_inverseMatrix, Matrix &Uref, Vector &Sref, Matrix &Vref, const double threshold=1e-6) |
| void | dynamicgraph::dampedInverse (const SVD_t &svd, Matrix &_inverseMatrix, const double threshold=1e-6) |
| void | dynamicgraph::pseudoInverse (Matrix &_inputMatrix, Matrix &_inverseMatrix, const double threshold=1e-6) |