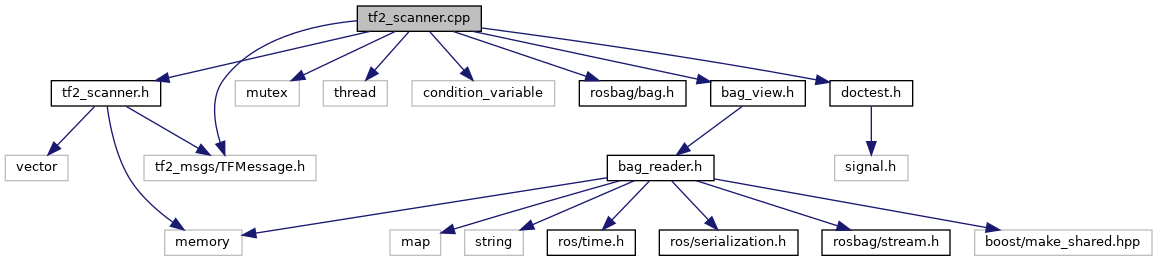
#include "tf2_scanner.h"#include <tf2_msgs/TFMessage.h>#include <mutex>#include <thread>#include <condition_variable>#include <rosbag/bag.h>#include "bag_view.h"#include "doctest.h"
Include dependency graph for tf2_scanner.cpp:
Go to the source code of this file.
Classes | |
| struct | rosbag_fancy::TF2Scanner::Private::Msg |
| class | rosbag_fancy::TF2Scanner::Private |
Namespaces | |
| rosbag_fancy | |
Functions | |
| rosbag_fancy::TEST_CASE ("TF2Scanner") | |