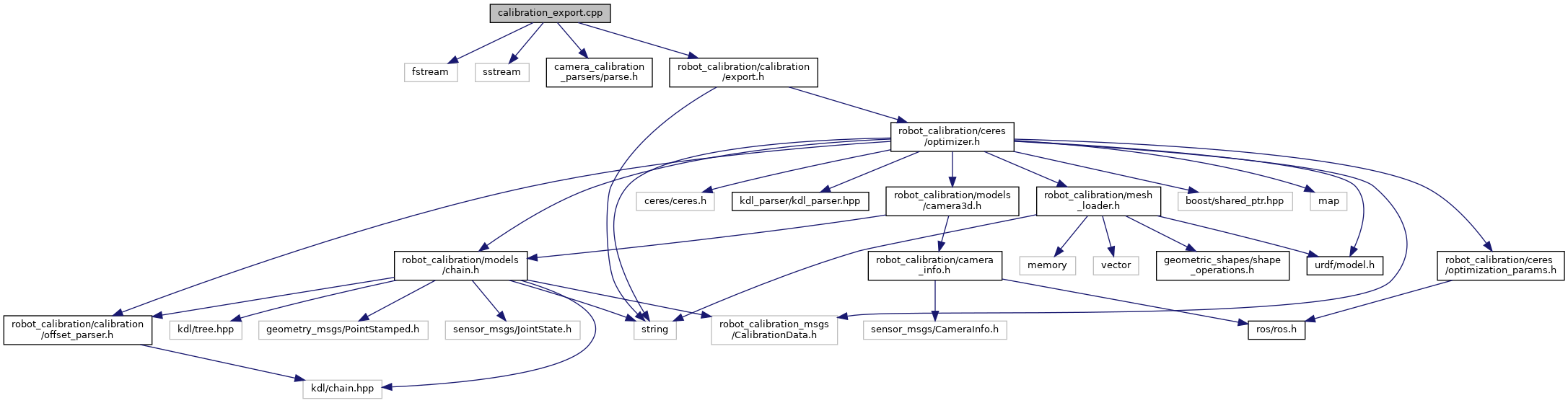
#include <fstream>#include <sstream>#include <camera_calibration_parsers/parse.h>#include "robot_calibration/calibration/export.h"
Include dependency graph for calibration_export.cpp:
Go to the source code of this file.
Namespaces | |
| robot_calibration | |
| Calibration code lives under this namespace. | |
Functions | |
| bool | robot_calibration::exportResults (Optimizer &optimizer, const std::string &initial_urdf, const std::vector< robot_calibration_msgs::CalibrationData > &data) |
| Write the outputs of a calibration. More... | |