#include <functional>#include <iostream>#include <memory>#include <stdexcept>#include <string>#include <thread>#include <future>#include <boost/asio.hpp>#include <boost/bind.hpp>#include "psen_scan_v2_standalone/data_conversion_layer/raw_scanner_data.h"#include "psen_scan_v2_standalone/util/logging.h"#include "psen_scan_v2_standalone/util/timestamp.h"
Include dependency graph for udp_client.h:

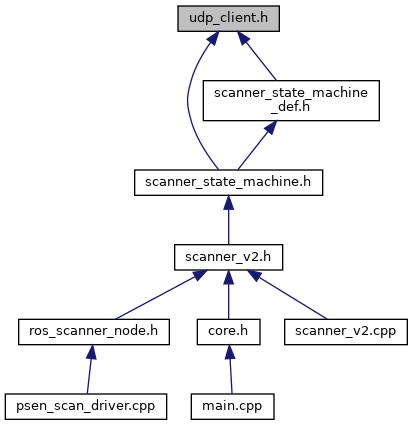
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | psen_scan_v2_standalone::communication_layer::UdpClientImpl::CloseConnectionFailure |
| Exception thrown if the UDP socket cannot be closed. More... | |
| class | psen_scan_v2_standalone::communication_layer::UdpClientImpl::OpenConnectionFailure |
| Exception thrown if the UDP socket cannot be opened. More... | |
| class | psen_scan_v2_standalone::communication_layer::UdpClientImpl |
| Helper for asynchronously sending and receiving data via UDP. More... | |
Namespaces | |
| psen_scan_v2_standalone | |
| Root namespace in which the software components to communicate with the scanner (firmware-version: 2) are realised/implemented. | |
| psen_scan_v2_standalone::communication_layer | |
| Namespace for the primitive communication layer implementation. | |
Typedefs | |
| using | psen_scan_v2_standalone::communication_layer::ErrorCallback = std::function< void(const std::string &)> |
| using | psen_scan_v2_standalone::communication_layer::NewMessageCallback = std::function< void(const data_conversion_layer::RawDataConstPtr &, const std::size_t &, const int64_t ×tamp)> |
Enumerations | |
| enum | psen_scan_v2_standalone::communication_layer::ReceiveMode { psen_scan_v2_standalone::communication_layer::ReceiveMode::single, psen_scan_v2_standalone::communication_layer::ReceiveMode::continuous } |
| Lists the different possible receive modi. More... | |