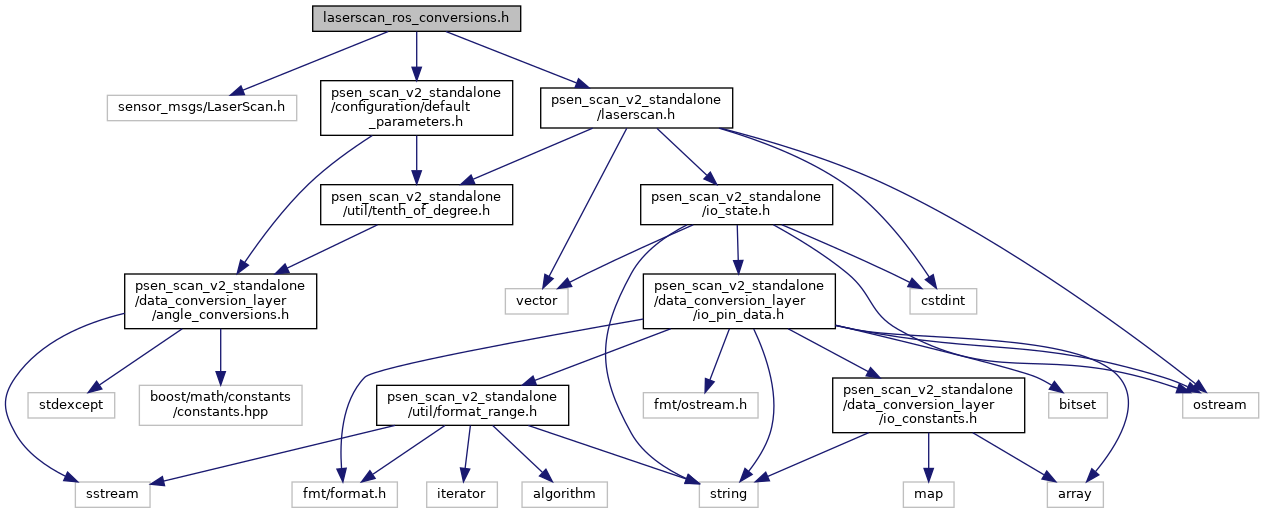
#include <sensor_msgs/LaserScan.h>#include "psen_scan_v2_standalone/configuration/default_parameters.h"#include "psen_scan_v2_standalone/laserscan.h"
Include dependency graph for laserscan_ros_conversions.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| psen_scan_v2 | |
| Root namespace for the ROS part. | |
Functions | |
| sensor_msgs::LaserScan | psen_scan_v2::toLaserScanMsg (const LaserScan &laserscan, const std::string &frame_id, const double x_axis_rotation) |