#include <position_controllers/joint_position_controller.h>#include <controller_interface/controller_base.h>#include <pluginlib/class_list_macros.hpp>#include <ros/time.h>
Include dependency graph for joint_position_controller.cpp:
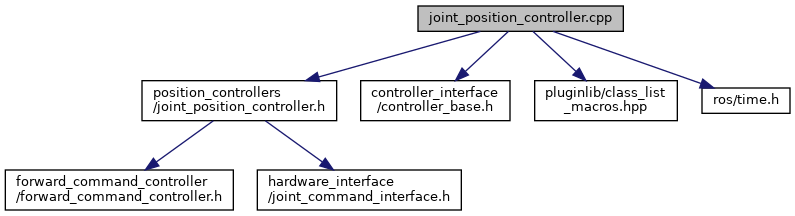
#include <position_controllers/joint_position_controller.h>#include <controller_interface/controller_base.h>#include <pluginlib/class_list_macros.hpp>#include <ros/time.h>