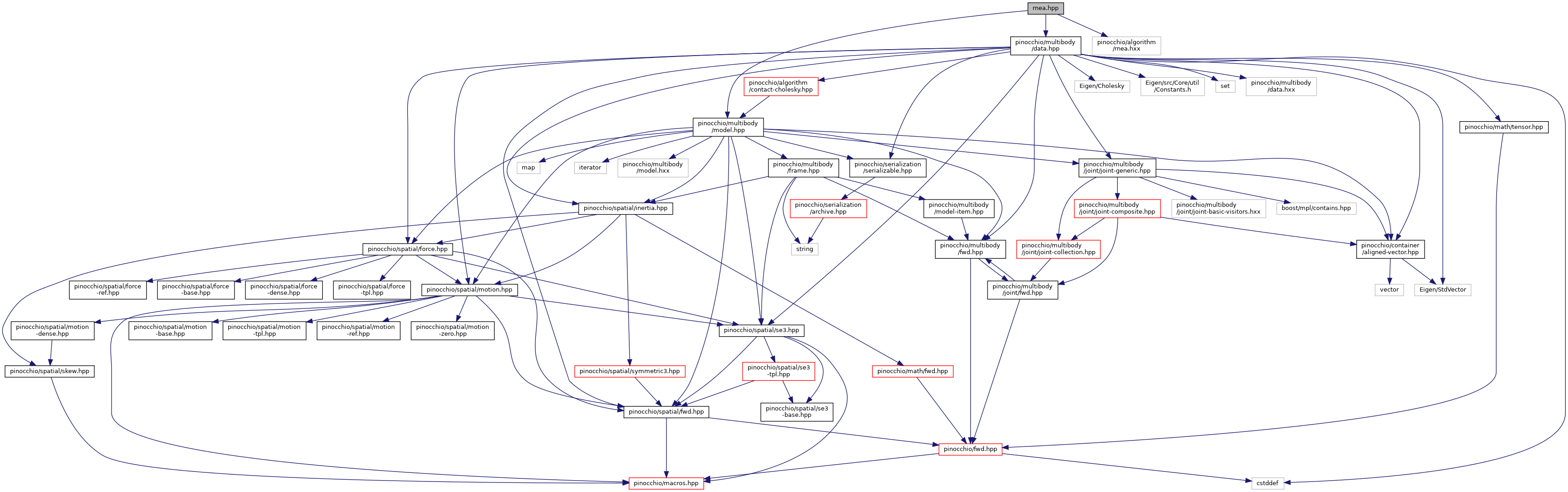
#include "pinocchio/multibody/model.hpp"#include "pinocchio/multibody/data.hpp"#include "pinocchio/algorithm/rnea.hxx"
Include dependency graph for rnea.hpp:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
Functions | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , typename TangentVectorType > | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::MatrixXs & | pinocchio::computeCoriolisMatrix (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q, const Eigen::MatrixBase< TangentVectorType > &v) |
Computes the Coriolis Matrix  of the Lagrangian dynamics: More... of the Lagrangian dynamics: More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType > | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::TangentVectorType & | pinocchio::computeGeneralizedGravity (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q) |
Computes the generalized gravity contribution  of the Lagrangian dynamics: More... of the Lagrangian dynamics: More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType > | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::TangentVectorType & | pinocchio::computeStaticTorque (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q, const container::aligned_vector< ForceTpl< Scalar, Options >> &fext) |
Computes the generalized static torque contribution  of the Lagrangian dynamics: More... of the Lagrangian dynamics: More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::MatrixXs & | pinocchio::getCoriolisMatrix (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data) |
| Retrives the Coriolis Matrix of the Lagrangian dynamics: More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , typename TangentVectorType > | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::TangentVectorType & | pinocchio::nonLinearEffects (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q, const Eigen::MatrixBase< TangentVectorType > &v) |
Computes the non-linear effects (Corriolis, centrifual and gravitationnal effects), also called the bias terms  of the Lagrangian dynamics: More... of the Lagrangian dynamics: More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , typename TangentVectorType1 , typename TangentVectorType2 > | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::TangentVectorType & | pinocchio::rnea (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q, const Eigen::MatrixBase< TangentVectorType1 > &v, const Eigen::MatrixBase< TangentVectorType2 > &a) |
| The Recursive Newton-Euler algorithm. It computes the inverse dynamics, aka the joint torques according to the current state of the system and the desired joint accelerations. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , typename TangentVectorType1 , typename TangentVectorType2 , typename ForceDerived > | |
| const DataTpl< Scalar, Options, JointCollectionTpl >::TangentVectorType & | pinocchio::rnea (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q, const Eigen::MatrixBase< TangentVectorType1 > &v, const Eigen::MatrixBase< TangentVectorType2 > &a, const container::aligned_vector< ForceDerived > &fext) |
| The Recursive Newton-Euler algorithm. It computes the inverse dynamics, aka the joint torques according to the current state of the system, the desired joint accelerations and the external forces. More... | |