#include "pinocchio/multibody/model.hpp"#include "pinocchio/multibody/data.hpp"#include "pinocchio/algorithm/kinematics.hxx"
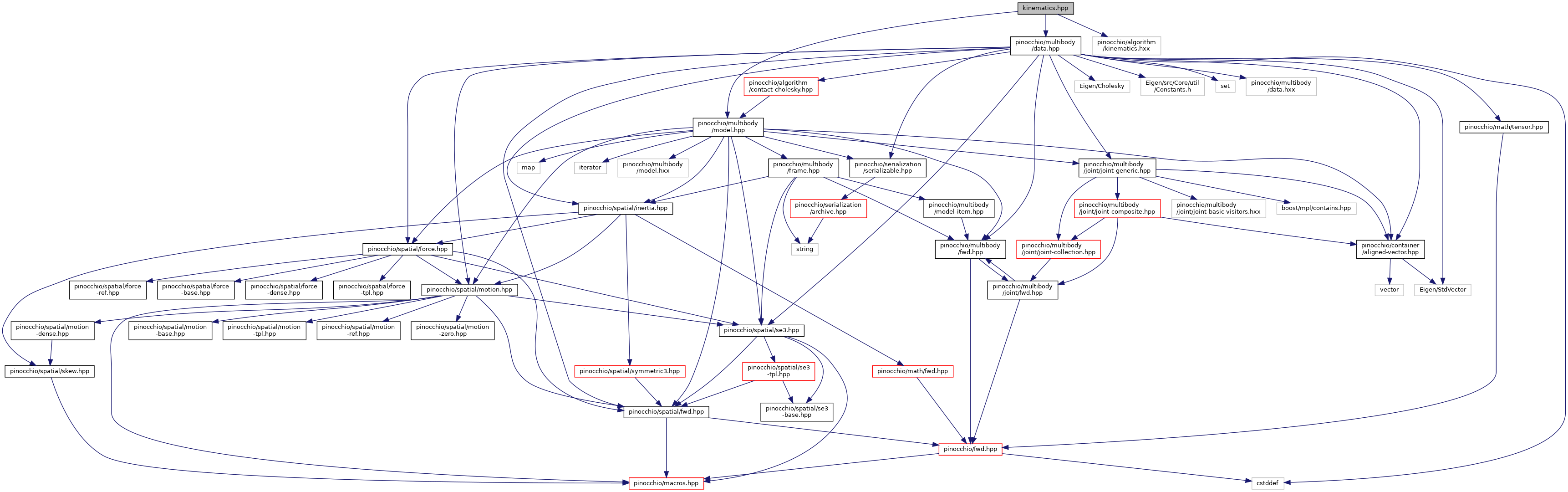
Include dependency graph for kinematics.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
Functions | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType > | |
| void | pinocchio::forwardKinematics (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q) |
| Update the joint placements according to the current joint configuration. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , typename TangentVectorType > | |
| void | pinocchio::forwardKinematics (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q, const Eigen::MatrixBase< TangentVectorType > &v) |
| Update the joint placements and spatial velocities according to the current joint configuration and velocity. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType , typename TangentVectorType1 , typename TangentVectorType2 > | |
| void | pinocchio::forwardKinematics (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data, const Eigen::MatrixBase< ConfigVectorType > &q, const Eigen::MatrixBase< TangentVectorType1 > &v, const Eigen::MatrixBase< TangentVectorType2 > &a) |
| Update the joint placements, spatial velocities and spatial accelerations according to the current joint configuration, velocity and acceleration. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| MotionTpl< Scalar, Options > | pinocchio::getAcceleration (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const DataTpl< Scalar, Options, JointCollectionTpl > &data, const JointIndex jointId, const ReferenceFrame rf=LOCAL) |
| Returns the spatial acceleration of the joint expressed in the desired reference frame. You must first call pinocchio::forwardKinematics to update placement, velocity and acceleration values in data structure. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| MotionTpl< Scalar, Options > | pinocchio::getClassicalAcceleration (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const DataTpl< Scalar, Options, JointCollectionTpl > &data, const JointIndex jointId, const ReferenceFrame rf=LOCAL) |
| Returns the "classical" acceleration of the joint expressed in the desired reference frame. This is different from the "spatial" acceleration in that centrifugal effects are accounted for. You must first call pinocchio::forwardKinematics to update placement, velocity and acceleration values in data structure. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| SE3Tpl< Scalar, Options > | pinocchio::getRelativePlacement (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const DataTpl< Scalar, Options, JointCollectionTpl > &data, const JointIndex jointIdRef, const JointIndex jointIdTarget, const Convention convention=Convention::LOCAL) |
| Returns the relative placement of two joints expressed in the desired reference frame. You must first call pinocchio::forwardKinematics to update placement values in data structure. LOCAL convention should only be used when aba and crba algorithms are called in LOCAL convention as well. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| MotionTpl< Scalar, Options > | pinocchio::getVelocity (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const DataTpl< Scalar, Options, JointCollectionTpl > &data, const JointIndex jointId, const ReferenceFrame rf=LOCAL) |
| Returns the spatial velocity of the joint expressed in the desired reference frame. You must first call pinocchio::forwardKinematics to update placement and velocity values in data structure. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| void | pinocchio::updateGlobalPlacements (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, DataTpl< Scalar, Options, JointCollectionTpl > &data) |
| Update the global placement of the joints oMi according to the relative placements of the joints. More... | |