#include <moveit/collision_detection/collision_common.h>#include <moveit/robot_model_loader/robot_model_loader.h>#include <moveit/planning_scene_monitor/planning_scene_monitor.h>#include <sensor_msgs/JointState.h>#include <std_msgs/Float64.h>#include <moveit_servo/servo_parameters.h>#include <moveit_servo/low_pass_filter.h>
Include dependency graph for collision_check.h:

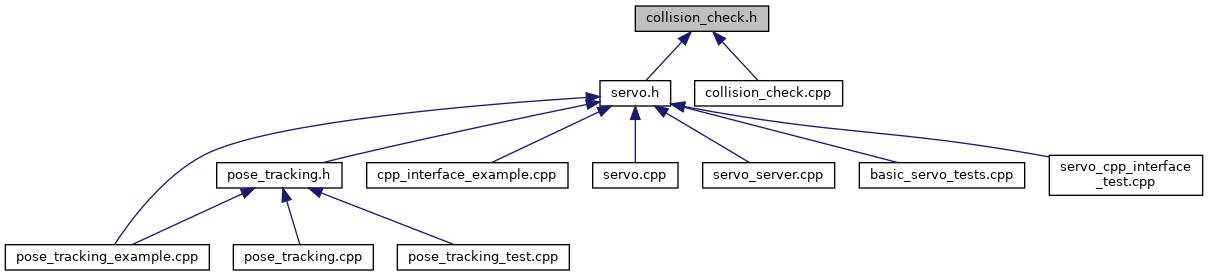
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | moveit_servo::CollisionCheck |
Namespaces | |
| moveit_servo | |
Enumerations | |
| enum | moveit_servo::CollisionCheckType { moveit_servo::K_THRESHOLD_DISTANCE = 1, moveit_servo::K_STOP_DISTANCE = 2 } |