#include <moveit/constraint_samplers/constraint_sampler.h>#include <moveit/macros/class_forward.h>#include <random_numbers/random_numbers.h>
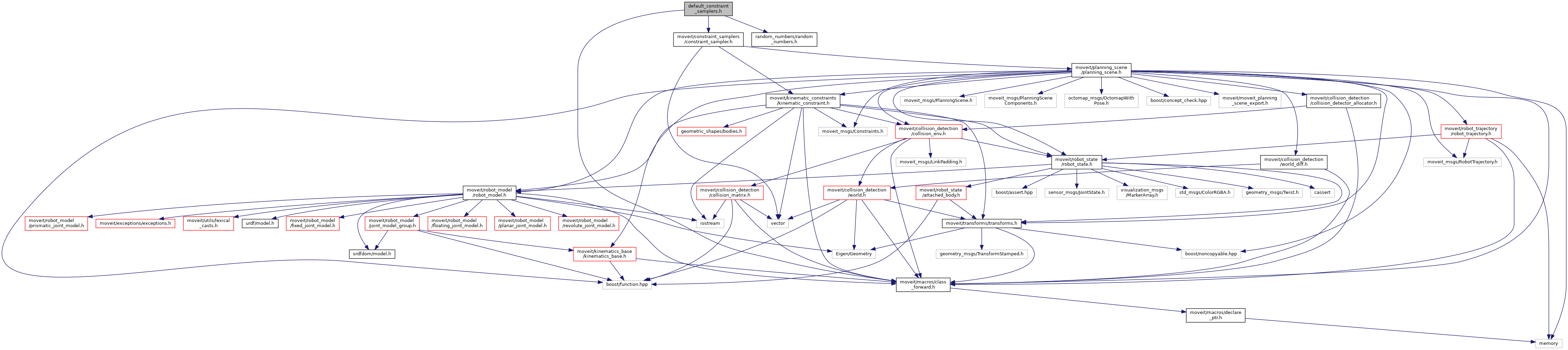
Include dependency graph for default_constraint_samplers.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | constraint_samplers::IKConstraintSampler |
| A class that allows the sampling of IK constraints. More... | |
| struct | constraint_samplers::IKSamplingPose |
| A structure for potentially holding a position constraint and an orientation constraint for use during Ik Sampling. More... | |
| class | constraint_samplers::JointConstraintSampler |
| JointConstraintSampler is a class that allows the sampling of joints in a particular group of the robot, subject to a set of individual joint constraints. More... | |
| struct | constraint_samplers::JointConstraintSampler::JointInfo |
| An internal structure used for maintaining constraints on a particular joint. More... | |
Namespaces | |
| constraint_samplers | |
| The constraint samplers namespace contains a number of methods for generating samples based on a constraint or set of constraints. | |
Functions | |
| random_numbers::RandomNumberGenerator | constraint_samplers::createSeededRNG (const std::string &seed_param) |
| constraint_samplers::MOVEIT_CLASS_FORWARD (IKConstraintSampler) | |
| constraint_samplers::MOVEIT_CLASS_FORWARD (JointConstraintSampler) | |