#include "lvr2/io/Timestamp.hpp"#include "lvr2/io/Model.hpp"#include "lvr2/io/CoordinateTransform.hpp"#include "lvr2/registration/TransformUtils.hpp"#include "lvr2/types/MatrixTypes.hpp"#include "lvr2/types/ScanTypes.hpp"#include <boost/filesystem.hpp>#include <Eigen/Dense>#include <fstream>#include <vector>#include "IOUtils.tcc"
Include dependency graph for IOUtils.hpp:
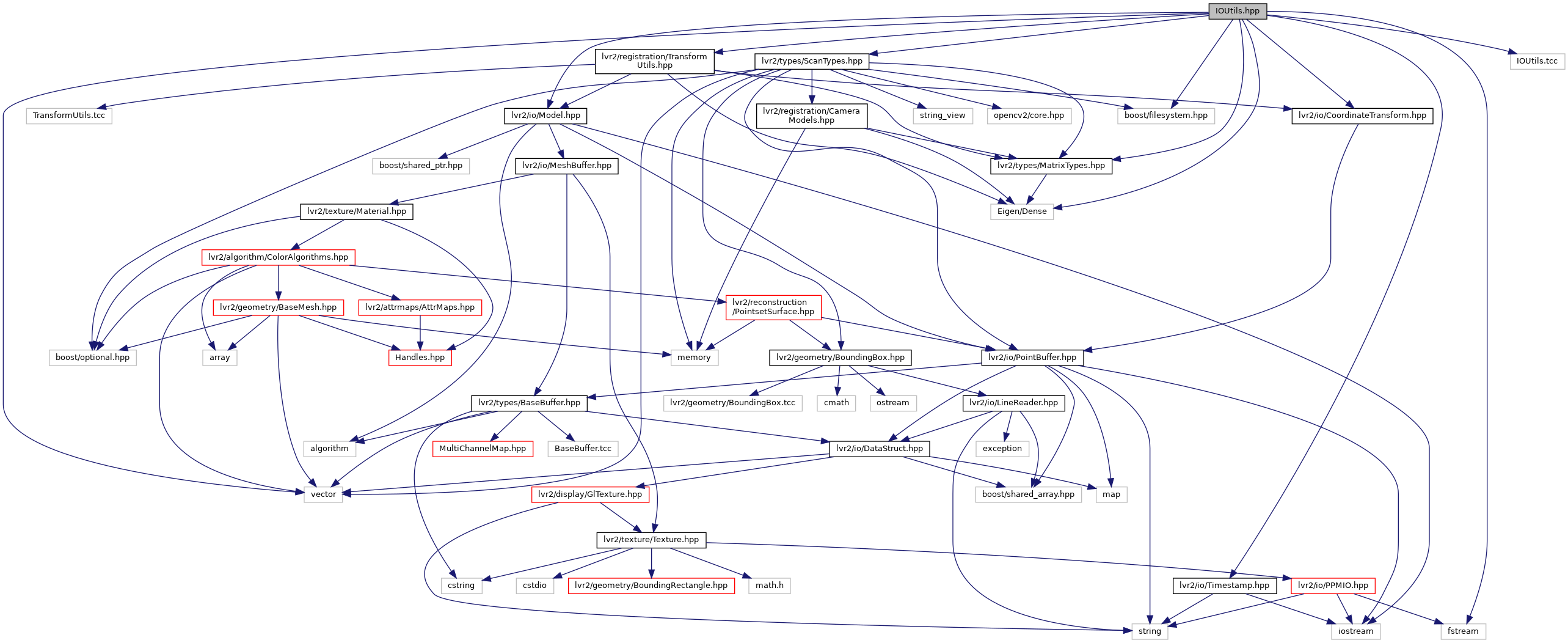
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| lvr2 | |
Functions | |
| size_t | lvr2::countPointsInFile (const boost::filesystem::path &inFile) |
| Counts the number of points (i.e. number of lines) in the given file. More... | |
| size_t | lvr2::getNumberOfPointsInPLY (const std::string &filename) |
| Get the Number Of Points (element points if present, vertex count otherwise) in a PLY file. More... | |
| void | lvr2::getPoseFromFile (BaseVector< float > &position, BaseVector< float > &angles, const boost::filesystem::path file) |
| Loads an Euler representation of from a pose file. More... | |
| size_t | lvr2::getReductionFactor (boost::filesystem::path &inFile, size_t targetSize) |
| Computes the reduction factor for a given target size (number of points) when reducing a point cloud loaded from an ASCII file using a modulo filter. More... | |
| size_t | lvr2::getReductionFactor (ModelPtr model, size_t targetSize) |
| Computes the reduction factor for a given target size (number of points) when reducing a point cloud using a modulo filter. More... | |
| template<typename T > | |
| Transform< T > | lvr2::getTransformationFromDat (const boost::filesystem::path &frames) |
| Returns a Eigen 4x4 maxtrix representation of the transformation represented in the given dat file. More... | |
| template<typename T > | |
| Transform< T > | lvr2::getTransformationFromFile (const boost::filesystem::path &file) |
| Returns a Eigen 4x4 maxtrix representation of the transformation represented in the given file. More... | |
| template<typename T > | |
| Transform< T > | lvr2::getTransformationFromFrames (const boost::filesystem::path &frames) |
| Returns a Eigen 4x4 maxtrix representation of the transformation represented in the given frame file. More... | |
| template<typename T > | |
| Transform< T > | lvr2::getTransformationFromPose (const boost::filesystem::path &pose) |
| Returns a Eigen 4x4 maxtrix representation of the transformation represented in the given pose file. More... | |
| template<typename T > | |
| Transform< T > | lvr2::loadFromFile (const boost::filesystem::path &file) |
| Reads an Eigen 4x4 matrix from the given file (16 coefficients, row major) More... | |
| void | lvr2::parseSLAMDirectory (std::string dir, vector< ScanPtr > &scans) |
| Reads a directory containing data from slam6d. Represents. More... | |
| void | lvr2::slamToLVRInPlace (PointBufferPtr src) |
| Transforms src, which is assumed to be in slam6Ds left-handed coordinate system into our right-handed default coordinate system. The transformation is done in-place, so the original data will be modified. More... | |
| PointBufferPtr | lvr2::subSamplePointBuffer (PointBufferPtr src, const size_t &n) |
| Computes a random sub-sampling of a point buffer by creating a uniform distribution over all point indices with given target size. The sub-sampling is applied to all channels in the source buffer. More... | |
| PointBufferPtr | lvr2::subSamplePointBuffer (PointBufferPtr src, const std::vector< size_t > &indices) |
| Computes a reduced version of the source buffer by sampling all channels using the given set of point indices. More... | |
| void | lvr2::transformPointCloudAndAppend (PointBufferPtr &buffer, boost::filesystem::path &transfromFile, std::vector< float > &pts, std::vector< float > &nrm) |
| Transforms the given point buffer according to the transformation stored in transformFile and appends the transformed points and normals to pts and nrm. More... | |
| template<typename T > | |
| void | lvr2::writeFrame (const Transform< T > &transform, const boost::filesystem::path &framesOut) |
| Writes a Eigen transformation into a .frames file. More... | |
| size_t | lvr2::writeModel (ModelPtr model, const boost::filesystem::path &outfile) |
| Writes the given model to the given file. More... | |
| void | lvr2::writePointsAndNormals (std::vector< float > &p, std::vector< float > &n, std::string outfile) |
| Writes the points and normals (float triples) stored in p and n to the given output file. Attention: The data is converted to a PointBuffer structure to be able to use the IO library, which results in a considerable memory overhead. More... | |
| size_t | lvr2::writePointsToStream (ModelPtr model, std::ofstream &out, bool nocolor=false) |
| Writes the points stored in the given model to the fiven output stream. This function is used to apend point cloud data to an already existing ASCII file.. More... | |
| void | lvr2::writePose (const BaseVector< float > &position, const BaseVector< float > &angles, const boost::filesystem::path &out) |
| Writes pose information in Euler representation to the given file. More... | |