#include <cassert>#include <fstream>#include <iostream>#include <limits>#include <memory>#include <string>#include <chrono>#include <cmath>#include "lvr2/io/PointBuffer.hpp"#include "lvr2/geometry/Normal.hpp"#include "lvr2/geometry/Plane.hpp"#include "lvr2/io/Progress.hpp"#include "lvr2/geometry/BaseVector.hpp"#include "PointsetSurface.hpp"#include "SearchTreeFlann.hpp"#include "lvr2/reconstruction/AdaptiveKSearchSurface.tcc"
Include dependency graph for AdaptiveKSearchSurface.hpp:

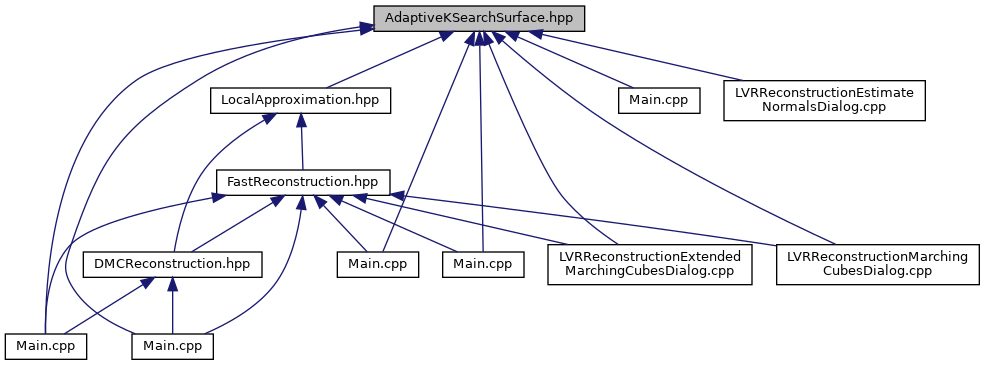
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | lvr2::AdaptiveKSearchSurface< BaseVecT > |
| A point cloud manager class that uses the STANN nearest neighbor search library to handle the data. This class calculates robust surface normals for the given point set as described in the SSRR2010 paper. More... | |
Namespaces | |
| lvr2 | |