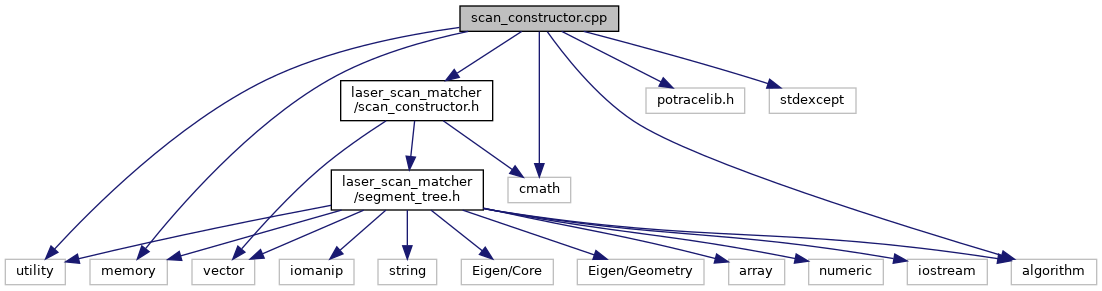
#include <laser_scan_matcher/scan_constructor.h>#include <potracelib.h>#include <algorithm>#include <utility>#include <memory>#include <stdexcept>#include <cmath>
Include dependency graph for scan_constructor.cpp:
Go to the source code of this file.
Namespaces | |
| scan_tools | |
Functions | |
| template<int N> | |
| Point | scan_tools::bezier (const Point *points, double t) |
| template<int N> | |
| Point | scan_tools::bezier (const Point(&points)[N], double t) |
| template<> | |
| Point | scan_tools::bezier< 1 > (const Point *point, double t) |
| double | scan_tools::cross2 (const Eigen::Vector2d &a, const Eigen::Vector2d &b) |
| std::vector< Segment > | scan_tools::extractSegments (const potrace_path_t *path_head) |
| Point | scan_tools::potrace_to_point (const potrace_dpoint_t &p) |
| std::pair< potrace_bitmap_t, std::unique_ptr< potrace_word[]> > | scan_tools::prepareBitmap (const ScanConstructor::grid_t &grid, int map_occupancy_threshold) |