#include "hpp/fcl/broadphase/broadphase_collision_manager.h"#include "hpp/fcl/collision_object.h"#include "hpp/fcl/narrowphase/continuous_collision_object.h"#include "hpp/fcl/broadphase/broadphase_continuous_collision_manager-inl.h"
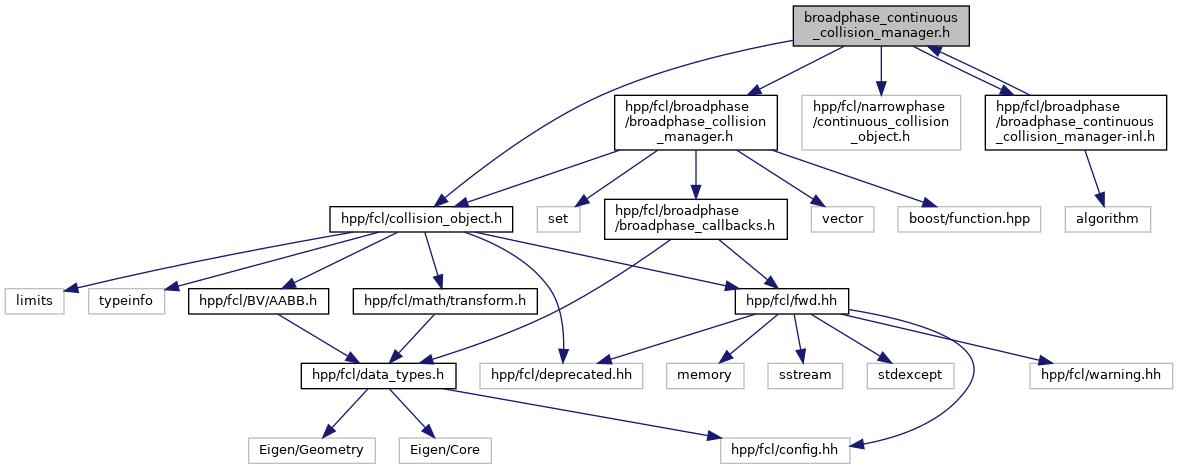
Include dependency graph for broadphase_continuous_collision_manager.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | hpp::fcl::BroadPhaseContinuousCollisionManager< S > |
| Base class for broad phase continuous collision. It helps to accelerate the continuous collision/distance between N objects. Also support self collision, self distance and collision/distance with another M objects. More... | |
Namespaces | |
| hpp | |
| Main namespace. | |
| hpp::fcl | |
Typedefs | |
| using | hpp::fcl::BroadPhaseContinuousCollisionManagerd = BroadPhaseContinuousCollisionManager< FCL_REAL > |
| using | hpp::fcl::BroadPhaseContinuousCollisionManagerf = BroadPhaseContinuousCollisionManager< float > |
| template<typename S > | |
| using | hpp::fcl::ContinuousCollisionCallBack = bool(*)(ContinuousCollisionObject *o1, ContinuousCollisionObject *o2, void *cdata) |
| Callback for continuous collision between two objects. Return value is whether can stop now. More... | |
| template<typename S > | |
| using | hpp::fcl::ContinuousDistanceCallBack = bool(*)(ContinuousCollisionObject *o1, ContinuousCollisionObject *o2, S &dist) |
| Callback for continuous distance between two objects, Return value is whether can stop now, also return the minimum distance till now. More... | |