A simple factor that can be used to trick gtsam solvers into believing a graph is connected. More...
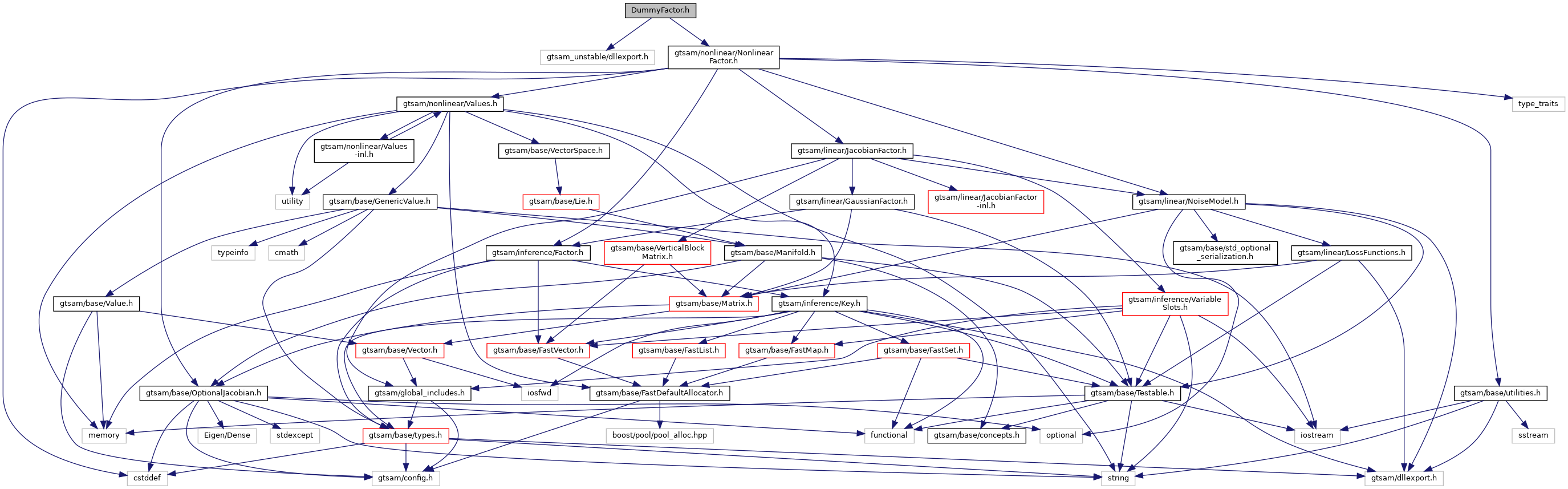
Include dependency graph for gtsam_unstable/slam/DummyFactor.h:
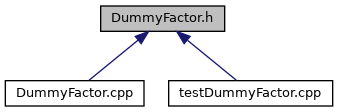
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | gtsam::DummyFactor< CAMERA > |
Namespaces | |
| gtsam | |
| traits | |
Detailed Description
A simple factor that can be used to trick gtsam solvers into believing a graph is connected.
- Date
- Sep 10, 2012
Definition in file gtsam_unstable/slam/DummyFactor.h.