3*3 matrix representation of SO(3) More...
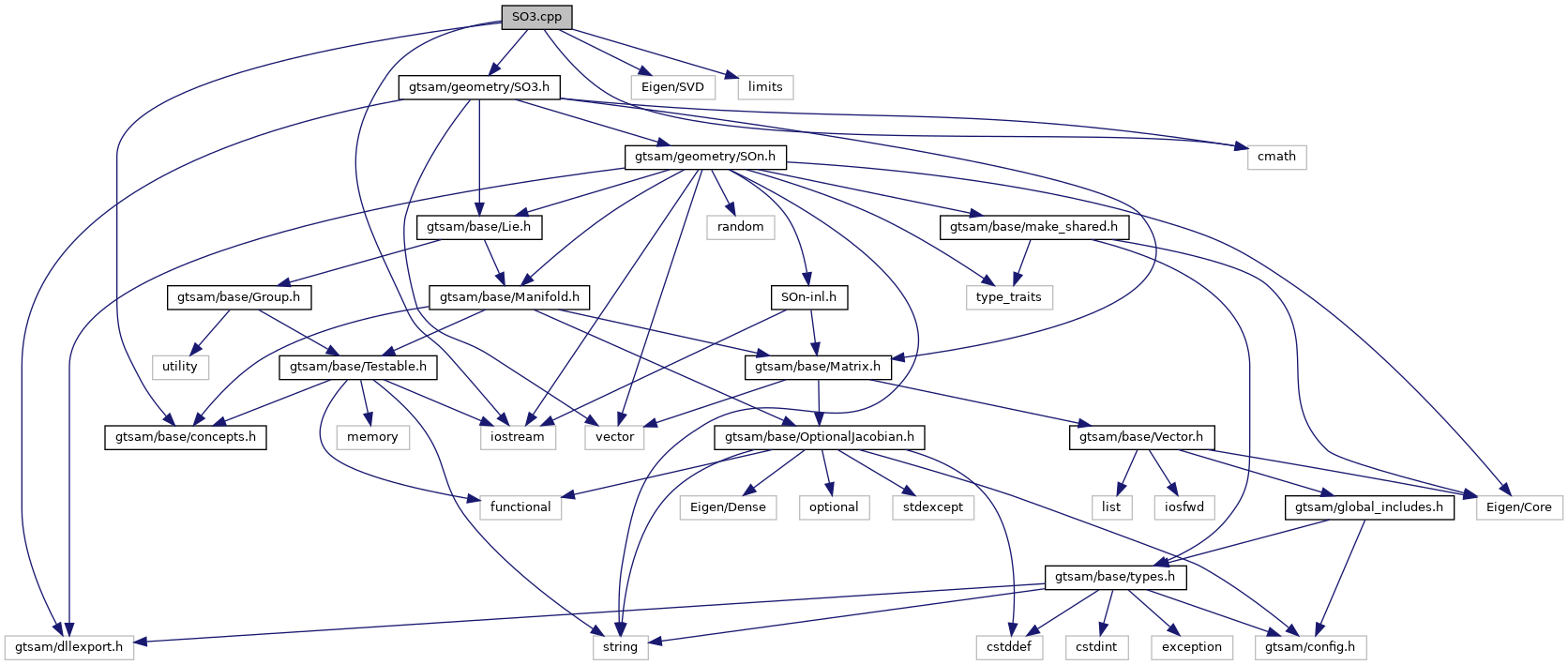
#include <gtsam/base/Matrix.h>#include <gtsam/base/Vector.h>#include <gtsam/base/concepts.h>#include <gtsam/geometry/Point3.h>#include <gtsam/geometry/SO3.h>#include <Eigen/SVD>#include <cmath>#include <limits>
Include dependency graph for SO3.cpp:
Go to the source code of this file.
Namespaces | |
| gtsam | |
| traits | |
| gtsam::so3 | |
Functions | |
| GTSAM_EXPORT Matrix3 | gtsam::so3::compose (const Matrix3 &M, const SO3 &R, OptionalJacobian< 9, 9 > H) |
| GTSAM_EXPORT Matrix99 | gtsam::so3::Dcompose (const SO3 &R) |
| (constant) Jacobian of compose wrpt M More... | |
| static std::vector< Matrix3 > | gtsam::G3 ({SO3::Hat(Vector3::Unit(0)), SO3::Hat(Vector3::Unit(1)), SO3::Hat(Vector3::Unit(2))}) |
| static Vector9 | gtsam::vec3 (const Matrix3 &R) |
Variables | |
| static constexpr double | gtsam::so3::k1_4Pi = 0.25 * kPi_inv |
| static constexpr double | gtsam::so3::k1_Pi2 = 1.0 / kPi2 |
| static constexpr double | gtsam::so3::k1_Pi3 = 1.0 / kPi3 |
| static constexpr double | gtsam::so3::k2_Pi3 = 2.0 * k1_Pi3 |
| static constexpr double | gtsam::so3::kNearPiThresholdSq = 1e-6 |
| static constexpr double | gtsam::so3::kNearZeroThresholdSq = 1e-6 |
| static constexpr double | gtsam::so3::kPi2 = M_PI * M_PI |
| static constexpr double | gtsam::so3::kPi3 = M_PI * kPi2 |
| static constexpr double | gtsam::so3::kPi_inv = 1.0 / M_PI |
| static constexpr double | gtsam::so3::one_120th = 1.0 / 120.0 |
| static constexpr double | gtsam::so3::one_1260th = 1.0 / 1260.0 |
| static constexpr double | gtsam::so3::one_12th = 1.0 / 12.0 |
| static constexpr double | gtsam::so3::one_180th = 1.0 / 180.0 |
| static constexpr double | gtsam::so3::one_24th = 1.0 / 24.0 |
| static constexpr double | gtsam::so3::one_60th = 1.0 / 60.0 |
| static constexpr double | gtsam::so3::one_6th = 1.0 / 6.0 |
| static constexpr double | gtsam::so3::one_720th = 1.0 / 720.0 |
| static const Matrix93 | gtsam::P3 |