This factor can be used to model relative position measurements from a (2D or 3D) pose to a landmark. More...
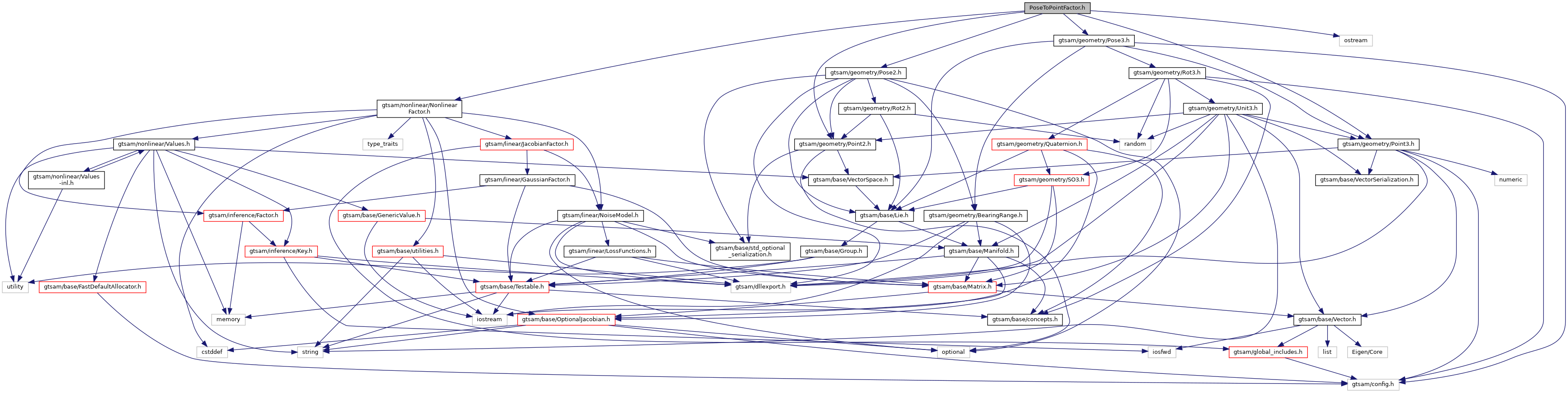
#include <gtsam/geometry/Point2.h>#include <gtsam/geometry/Pose2.h>#include <gtsam/geometry/Point3.h>#include <gtsam/geometry/Pose3.h>#include <gtsam/nonlinear/NonlinearFactor.h>#include <ostream>
Include dependency graph for PoseToPointFactor.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | gtsam::PoseToPointFactor< POSE, POINT > |
Namespaces | |
| gtsam | |
| traits | |
Detailed Description
This factor can be used to model relative position measurements from a (2D or 3D) pose to a landmark.
Definition in file PoseToPointFactor.h.